 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage classification in frequency domain with 2SReLU: a second harmonics superposition activation function
Jun 18, 2020
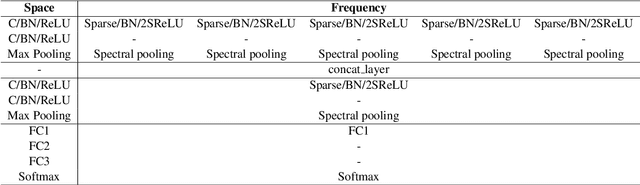
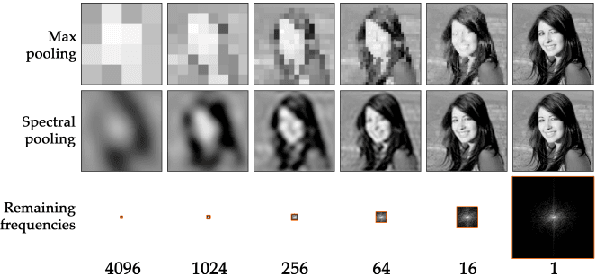
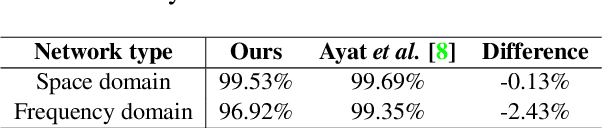
Deep Convolutional Neural Networks are able to identify complex patterns and perform tasks with super-human capabilities. However, besides the exceptional results, they are not completely understood and it is still impractical to hand-engineer similar solutions. In this work, an image classification Convolutional Neural Network and its building blocks are described from a frequency domain perspective. Some network layers have established counterparts in the frequency domain like the convolutional and pooling layers. We propose the 2SReLU layer, a novel non-linear activation function that preserves high frequency components in deep networks. It is demonstrated that in the frequency domain it is possible to achieve competitive results without using the computationally costly convolution operation. A source code implementation in PyTorch is provided at: https://gitlab.com/thomio/2srelu
Environment reconstruction on depth images using Generative Adversarial Networks
Dec 09, 2019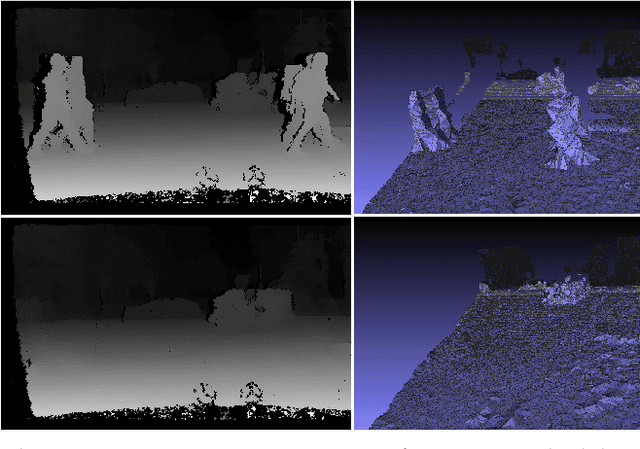
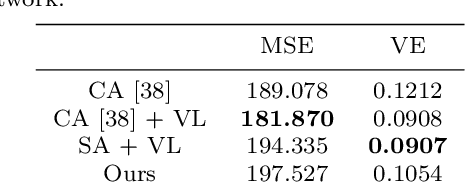
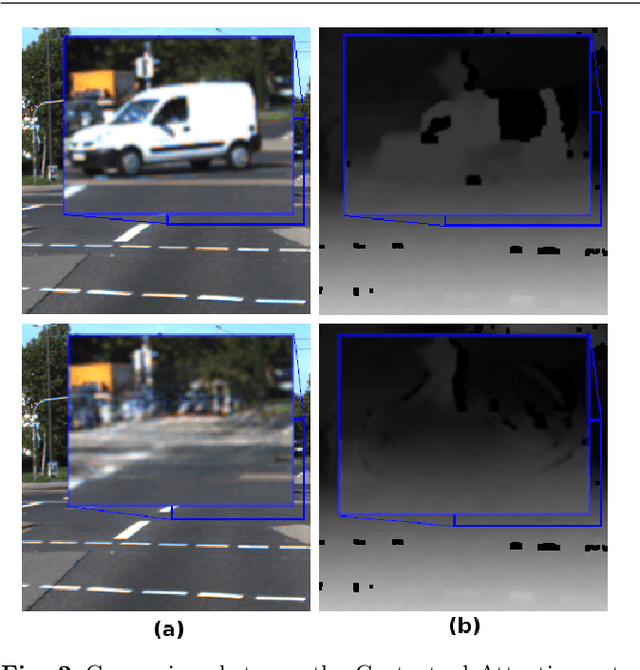

Robust perception systems are essential for autonomous vehicle safety. To navigate in a complex urban environment, it is necessary precise sensors with reliable data. The task of understanding the surroundings is hard by itself; for intelligent vehicles, it is even more critical due to the high speed in which the vehicle navigates. To successfully navigate in an urban environment, the perception system must quickly receive, process, and execute an action to guarantee both passenger and pedestrian safety. Stereo cameras collect environment information at many levels, e.g., depth, color, texture, shape, which guarantee ample knowledge about the surroundings. Even so, when compared to human, computational methods lack the ability to deal with missing information, i.e., occlusions. For many perception tasks, this lack of data can be a hindrance due to the environment incomplete information. In this paper, we address this problem and discuss recent methods to deal with occluded areas inference. We then introduce a loss function focused on disparity and environment depth data reconstruction, and a Generative Adversarial Network (GAN) architecture able to deal with occluded information inference. Our results present a coherent reconstruction on depth maps, estimating regions occluded by different obstacles. Our final contribution is a loss function focused on disparity data and a GAN able to extract depth features and estimate depth data by inpainting disparity images.
Driving Simulator Platform for Development and Evaluation of Safety and Emergency Systems
Feb 01, 2018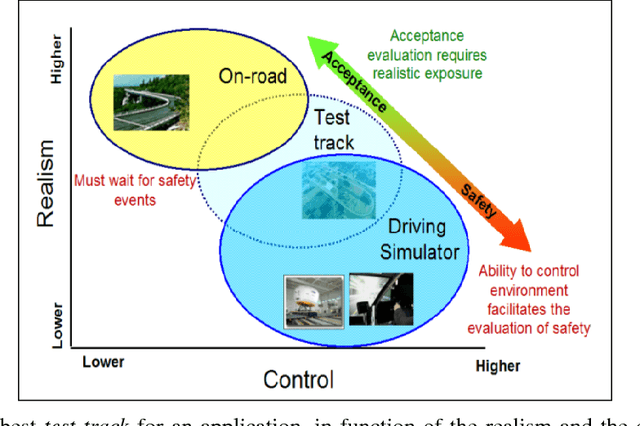
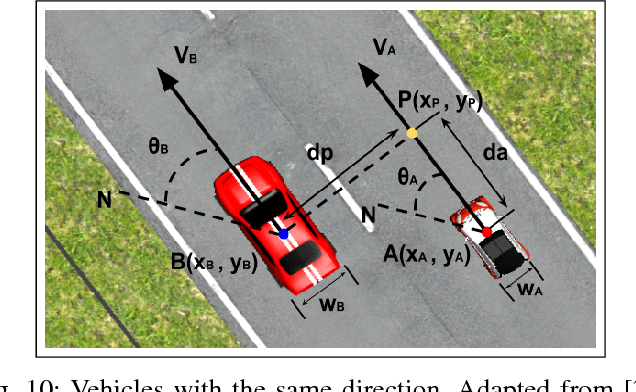
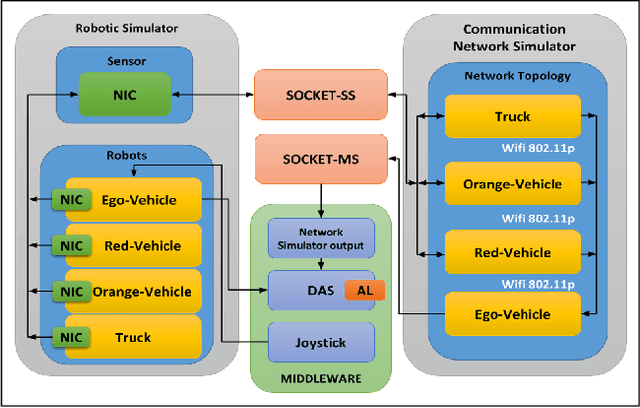
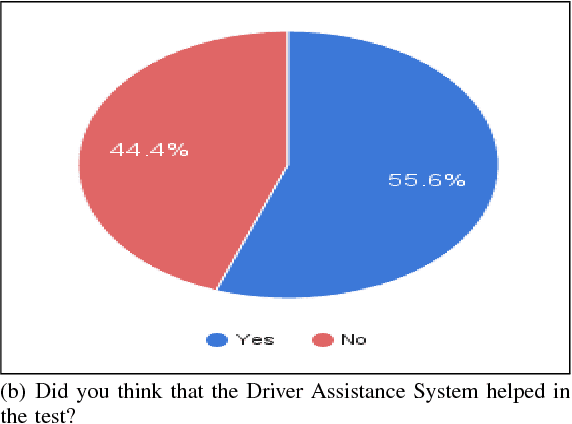
According to data from the United Nations, more than 3000 people have died each day in the world due to road traffic collision. Considering recent researches, the human error may be considered as the main responsible for these fatalities. Because of this, researchers seek alternatives to transfer the vehicle control from people to autonomous systems. However, providing this technological innovation for the people may demand complex challenges in the legal, economic and technological areas. Consequently, carmakers and researchers have divided the driving automation in safety and emergency systems that improve the driver perception on the road. This may reduce the human error. Therefore, the main contribution of this study is to propose a driving simulator platform to develop and evaluate safety and emergency systems, in the first design stage. This driving simulator platform has an advantage: a flexible software structure.This allows in the simulation one adaptation for development or evaluation of a system. The proposed driving simulator platform was tested in two applications: cooperative vehicle system development and the influence evaluation of a Driving Assistance System (\textit{DAS}) on a driver. In the cooperative vehicle system development, the results obtained show that the increment of the time delay in the communication among vehicles ($V2V$) is determinant for the system performance. On the other hand, in the influence evaluation of a \textit{DAS} in a driver, it was possible to conclude that the \textit{DAS'} model does not have the level of influence necessary in a driver to avoid an accident.