 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Size Complexity and Decidability of First-Order Progression
May 12, 2026Progression, the task of updating a knowledge base to reflect action effects, generally requires second-order logic. Identifying first-order special cases, by restricting either the knowledge base or action effects, has long been a central topic in reasoning about actions. It is known that local-effect, normal, and acyclic actions, three increasingly expressive classes, admit first-order progression. However, a systematic analysis of the size of such progressions, crucial for practical applications, has been missing. In this paper, using the framework of Situation Calculus, we show that under reasonable assumptions, first-order progression for these action classes grows only polynomially. Moreover, we show that when the KB belongs to decidable fragments such as two-variable first-order logic or universal theories with constants, the progression remains within the same fragment, ensuring decidability and practical applicability.
What Is a Counterfactual Cause in Action Theories?
Jan 12, 2025Since the proposal by Halpern and Pearl, reasoning about actual causality has gained increasing attention in artificial intelligence, ranging from domains such as model-checking and verification to reasoning about actions and knowledge. More recently, Batusov and Soutchanski proposed a notion of actual achievement cause in the situation calculus, amongst others, they can determine the cause of quantified effects in a given action history. While intuitively appealing, this notion of cause is not defined in a counterfactual perspective. In this paper, we propose a notion of cause based on counterfactual analysis. In the context of action history, we show that our notion of cause generalizes naturally to a notion of achievement cause. We analyze the relationship between our notion of the achievement cause and the achievement cause by Batusov and Soutchanski. Finally, we relate our account of cause to Halpern and Pearl's account of actual causality. Particularly, we note some nuances in applying a counterfactual viewpoint to disjunctive goals, a common thorn to definitions of actual causes.
On the Verification of Belief Programs
May 03, 2022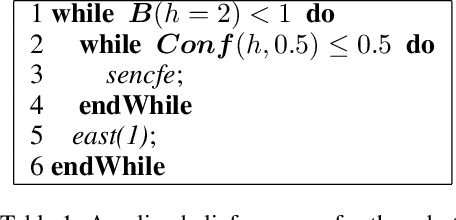
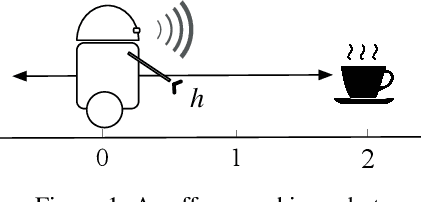
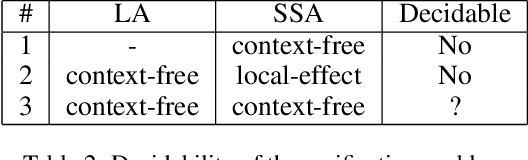
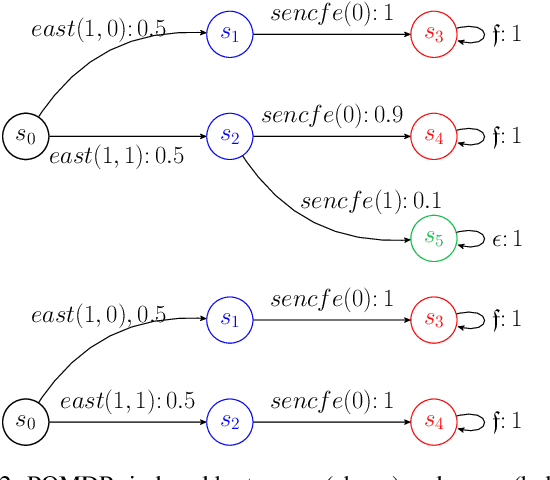
In a recent paper, Belle and Levesque proposed a framework for a type of program called belief programs, a probabilistic extension of GOLOG programs where every action and sensing result could be noisy and every test condition refers to the agent's subjective beliefs. Inherited from GOLOG programs, the action-centered feature makes belief programs fairly suitable for high-level robot control under uncertainty. An important step before deploying such a program is to verify whether it satisfies properties as desired. At least two problems exist in doing verification: how to formally specify properties of a program and what is the complexity of verification. In this paper, we propose a formalism for belief programs based on a modal logic of actions and beliefs. Among other things, this allows us to express PCTL-like temporal properties smoothly. Besides, we investigate the decidability and undecidability for the verification problem of belief programs.