 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Relevant Points for Nearest-Neighbor Classification
Oct 12, 2021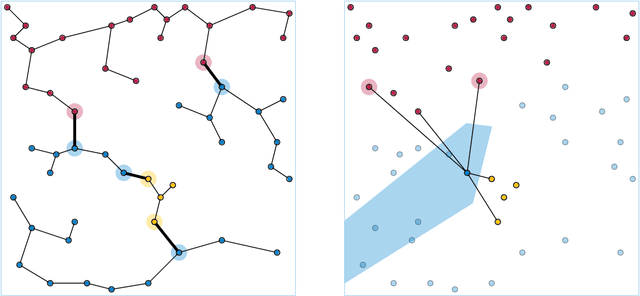
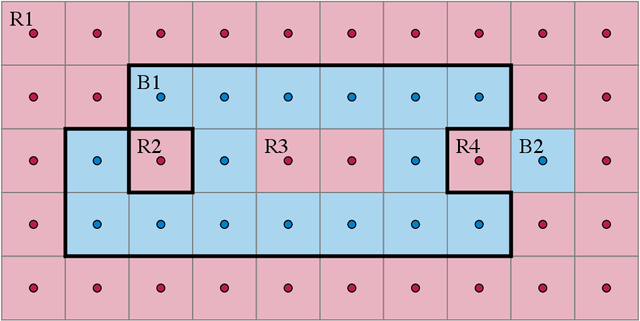
In nearest-neighbor classification problems, a set of $d$-dimensional training points are given, each with a known classification, and are used to infer unknown classifications of other points by using the same classification as the nearest training point. A training point is relevant if its omission from the training set would change the outcome of some of these inferences. We provide a simple algorithm for thinning a training set down to its subset of relevant points, using as subroutines algorithms for finding the minimum spanning tree of a set of points and for finding the extreme points (convex hull vertices) of a set of points. The time bounds for our algorithm, in any constant dimension $d\ge 3$, improve on a previous algorithm for the same problem by Clarkson (FOCS 1994).
Nonrepetitive Paths and Cycles in Graphs with Application to Sudoku
Jul 20, 2005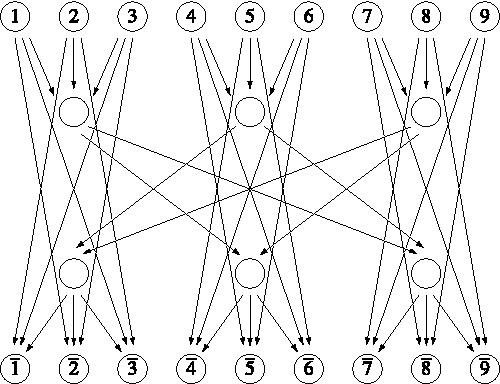
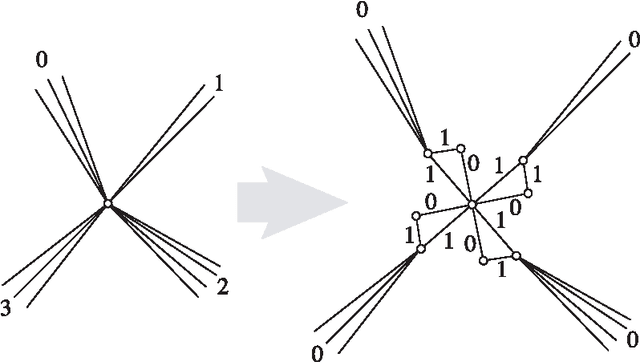
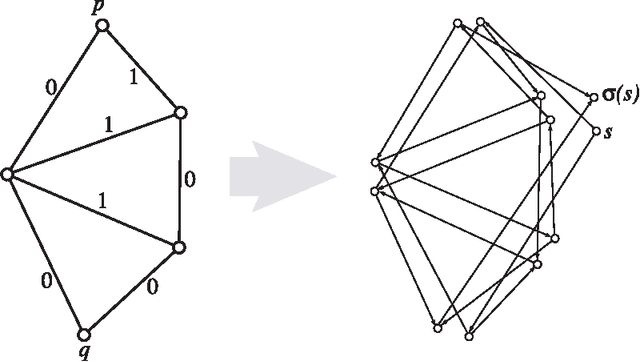
We provide a simple linear time transformation from a directed or undirected graph with labeled edges to an unlabeled digraph, such that paths in the input graph in which no two consecutive edges have the same label correspond to paths in the transformed graph and vice versa. Using this transformation, we provide efficient algorithms for finding paths and cycles with no two consecutive equal labels. We also consider related problems where the paths and cycles are required to be simple; we find efficient algorithms for the undirected case of these problems but show the directed case to be NP-complete. We apply our path and cycle finding algorithms in a program for generating and solving Sudoku puzzles, and show experimentally that they lead to effective puzzle-solving rules that may also be of interest to human Sudoku puzzle solvers.
Optimization Over Zonotopes and Training Support Vector Machines
May 08, 2001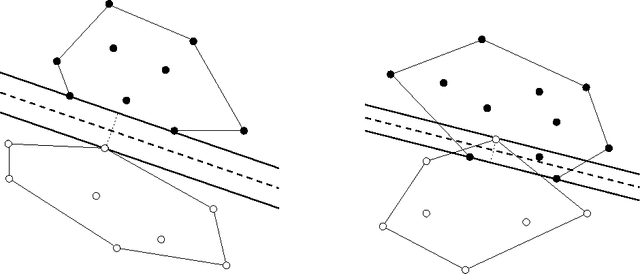
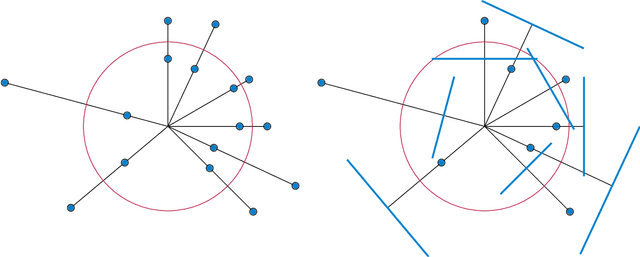
We make a connection between classical polytopes called zonotopes and Support Vector Machine (SVM) classifiers. We combine this connection with the ellipsoid method to give some new theoretical results on training SVMs. We also describe some special properties of soft margin C-SVMs as parameter C goes to infinity.
Searching for Spaceships
Apr 26, 2000

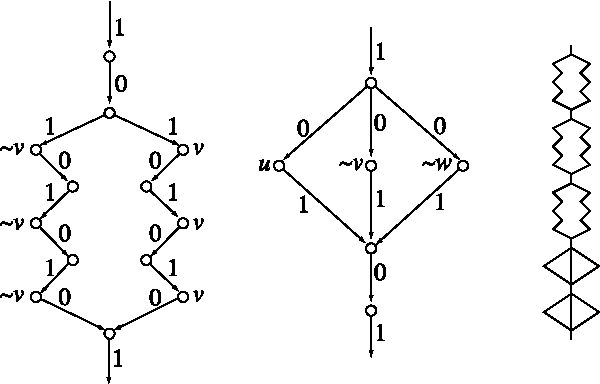
We describe software that searches for spaceships in Conway's Game of Life and related two-dimensional cellular automata. Our program searches through a state space related to the de Bruijn graph of the automaton, using a method that combines features of breadth first and iterative deepening search, and includes fast bit-parallel graph reachability and path enumeration algorithms for finding the successors of each state. Successful results include a new 2c/7 spaceship in Life, found by searching a space with 2^126 states.
* 17 pages, 13 figures. This revision adds Paul Tooke's new c/6 "dragon", and corrects one URL. For more information about the software and patterns described here, see http://www.ics.uci.edu/~eppstein/ca/