 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFixed-time Adaptive Neural Control for Physical Human-Robot Collaboration with Time-Varying Workspace Constraints
Mar 04, 2023



Physical human-robot collaboration (pHRC) requires both compliance and safety guarantees since robots coordinate with human actions in a shared workspace. This paper presents a novel fixed-time adaptive neural control methodology for handling time-varying workspace constraints that occur in physical human-robot collaboration while also guaranteeing compliance during intended force interactions. The proposed methodology combines the benefits of compliance control, time-varying integral barrier Lyapunov function (TVIBLF) and fixed-time techniques, which not only achieve compliance during physical contact with human operators but also guarantee time-varying workspace constraints and fast tracking error convergence without any restriction on the initial conditions. Furthermore, a neural adaptive control law is designed to compensate for the unknown dynamics and disturbances of the robot manipulator such that the proposed control framework is overall fixed-time converged and capable of online learning without any prior knowledge of robot dynamics and disturbances. The proposed approach is finally validated on a simulated two-link robot manipulator. Simulation results show that the proposed controller is superior in the sense of both tracking error and convergence time compared with the existing barrier Lyapunov functions based controllers, while simultaneously guaranteeing compliance and safety.
Fixed-time Integral Sliding Mode Control for Admittance Control of a Robot Manipulator
Aug 09, 2022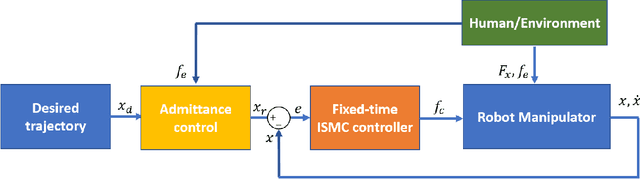

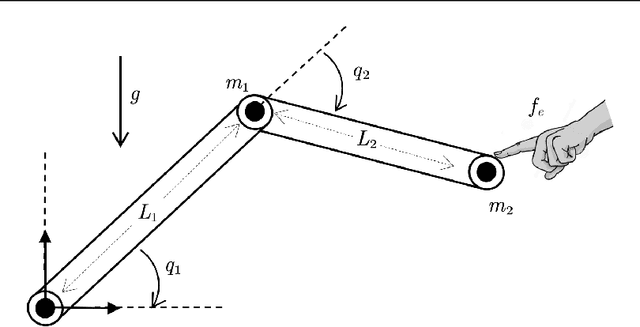
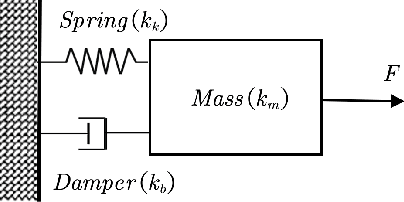
This paper proposes a novel fixed-time integral sliding mode controller for admittance control to enhance physical human-robot collaboration. The proposed method combines the benefits of compliance to external forces of admittance control and high robustness to uncertainties of integral sliding mode control (ISMC), such that the system can collaborate with a human partner in an uncertain environment effectively. Firstly, a fixed-time sliding surface is applied in the ISMC to make the tracking error of the system converge within a fixed-time regardless of the initial condition. Then, a fixed-time backstepping controller (BSP) is integrated into the ISMC as the nominal controller to realize global fixed-time convergence. Furthermore, to overcome the singularity problem, a non-singular fixed-time sliding surface is designed and integrated into the controller, which is useful for practical application. Finally, the proposed controller is validated for a two-link robot manipulator with uncertainties and external human forces. The results show that the proposed controller is superior in the sense of both tracking error and convergence time, and at the same time, can comply with human motion in a shared workspace.
Adaptive Admittance Control for Safety-Critical Physical Human Robot Collaboration
Aug 09, 2022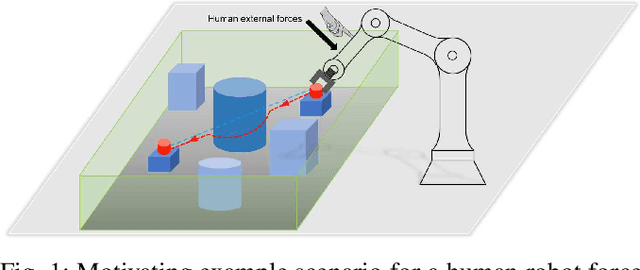
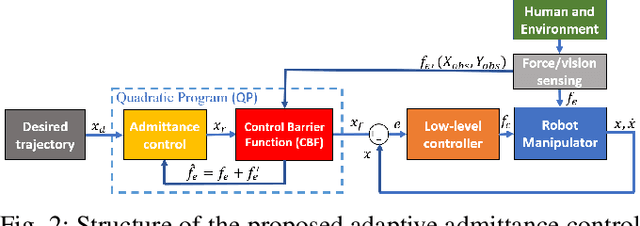
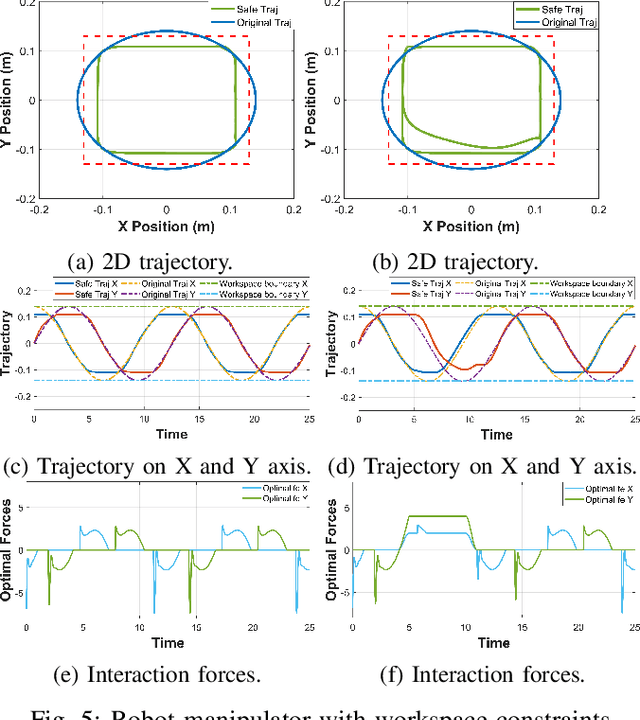
Physical human-robot collaboration requires strict safety guarantees since robots and humans work in a shared workspace. This letter presents a novel control framework to handle safety-critical position-based constraints for human-robot physical interaction. The proposed methodology is based on admittance control, exponential control barrier functions (ECBFs) and quadratic program (QP) to achieve compliance during the force interaction between human and robot, while simultaneously guaranteeing safety constraints. In particular, the formulation of admittance control is rewritten as a second-order nonlinear control system, and the interaction forces between humans and robots are regarded as the control input. A virtual force feedback for admittance control is provided in real-time by using the ECBFs-QP framework as a compensator of the external human forces. A safe trajectory is therefore derived from the proposed adaptive admittance control scheme for a low-level controller to track. The innovation of the proposed approach is that the proposed controller will enable the robot to comply with human forces with natural fluidity without violation of any safety constraints even in cases where human external forces incidentally force the robot to violate constraints. The effectiveness of our approach is demonstrated in simulation studies on a two-link planar robot manipulator.