 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Learning-Based Gyrocompassing
Dec 19, 2023Inertial navigation systems (INS) are widely used in both manned and autonomous platforms. One of the most critical tasks prior to their operation is to accurately determine their initial alignment while stationary, as it forms the cornerstone for the entire INS operational trajectory. While low-performance accelerometers can easily determine roll and pitch angles (leveling), establishing the heading angle (gyrocompassing) with low-performance gyros proves to be a challenging task without additional sensors. This arises from the limited signal strength of Earth's rotation rate, often overridden by gyro noise itself. To circumvent this deficiency, in this study we present a practical deep learning framework to effectively compensate for the inherent errors in low-performance gyroscopes. The resulting capability enables gyrocompassing, thereby eliminating the need for subsequent prolonged filtering phase (fine alignment). Through the development of theory and experimental validation, we demonstrate that the improved initial conditions establish a new lower error bound, bringing affordable gyros one step closer to being utilized in high-end tactical tasks.
Information Aided Navigation: A Review
Jan 03, 2023The performance of inertial navigation systems is largely dependent on the stable flow of external measurements and information to guarantee continuous filter updates and bind the inertial solution drift. Platforms in different operational environments may be prevented at some point from receiving external measurements, thus exposing their navigation solution to drift. Over the years, a wide variety of works have been proposed to overcome this shortcoming, by exploiting knowledge of the system current conditions and turning it into an applicable source of information to update the navigation filter. This paper aims to provide an extensive survey of information aided navigation, broadly classified into direct, indirect, and model aiding. Each approach is described by the notable works that implemented its concept, use cases, relevant state updates, and their corresponding measurement models. By matching the appropriate constraint to a given scenario, one will be able to improve the navigation solution accuracy, compensate for the lost information, and uncover certain internal states, that would otherwise remain unobservable.
A Learning-based approach for bias elimination in low cost gyroscopes
Oct 10, 2022



Modern sensors play a pivotal role in many operating platforms, as they manage to track the platform dynamics at a relatively low manufacturing costs. Their widespread use can be found starting from autonomous vehicles, through tactical platforms, and ending with household appliances in daily use. Upon leaving the factory, the calibrated sensor starts accumulating different error sources which slowly wear out its precision and reliability. To that end, periodic calibration is needed, to restore intrinsic parameters and realign its readings with the ground truth. While extensive analytic methods exist in the literature, little is proposed using data-driven techniques and their unprecedented approximation capabilities. In this study, we show how bias elimination in low-cost gyroscopes can be performed in considerably shorter operative time, using a unique convolutional neural network structure. The strict constraints of traditional methods are replaced by a learning-based regression which spares the time-consuming averaging time, exhibiting efficient sifting of background noise from the actual bias.
Data-Driven Denoising of Accelerometer Signals
Jun 13, 2022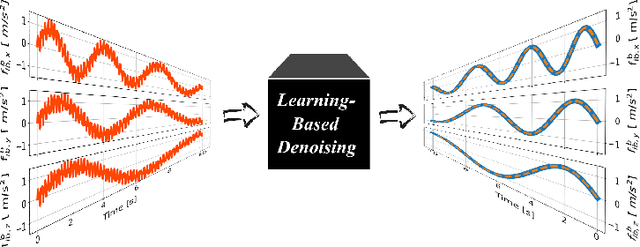
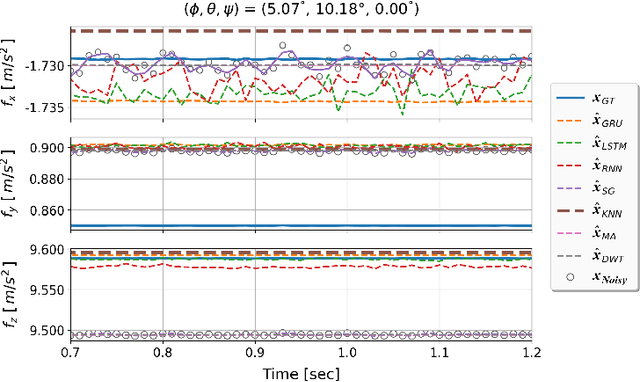
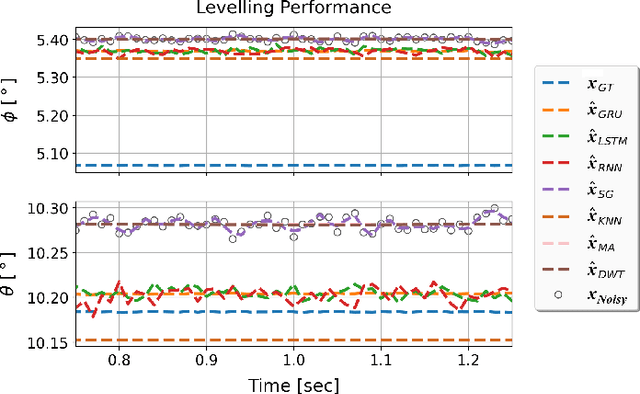
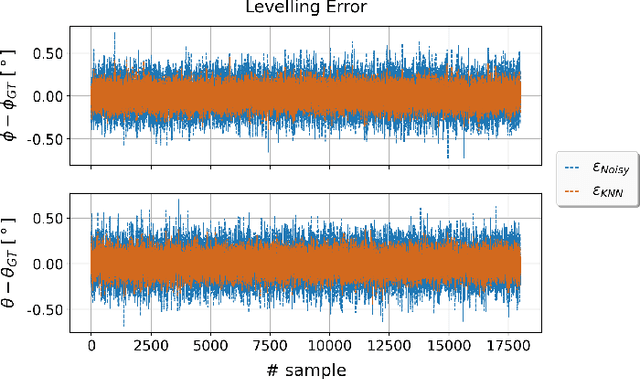
Modern navigation solutions are largely dependent on the performances of the standalone inertial sensors, especially at times when no external sources are available. During these outages, the inertial navigation solution is likely to degrade over time due to instrumental noises sources, particularly when using consumer low-cost inertial sensors. Conventionally, model-based estimation algorithms are employed to reduce noise levels and enhance meaningful information, thus improving the navigation solution directly. However, guaranteeing their optimality often proves to be challenging as sensors performance differ in manufacturing quality, process noise modeling, and calibration precision. In the literature, most inertial denoising models are model-based when recently several data-driven approaches were suggested primarily for gyroscope measurements denoising. Data-driven approaches for accelerometer denoising task are more challenging due to the unknown gravity projection on the accelerometer axes. To fill this gap, we propose several learning-based approaches and compare their performances with prominent denoising algorithms, in terms of pure noise removal, followed by stationary coarse alignment procedure. Based on the benchmarking results, obtained in field experiments, we show that: (i) learning-based models perform better than traditional signal processing filtering; (ii) non-parametric kNN algorithm outperforms all state of the art deep learning models examined in this study; (iii) denoising can be fruitful for pure inertial signal reconstruction, but moreover for navigation-related tasks, as both errors are shown to be reduced up to one order of magnitude.
A Study of a Genetic Algorithm for Polydisperse Spray Flames
Aug 11, 2020Modern technological advancements constantly push forward the human-machine interaction. Evolutionary Algorithms (EA) are an machine learning (ML) subclass inspired by the process of natural selection - Survival of the Fittest, as stated by the Darwinian Theory of Evolution. The most notable algorithm in that class is the Genetic Algorithm (GA) - a powerful heuristic tool which enables the generation of a high-quality solutions to optimization problems. In recent decades the algorithm underwent remarkable improvement, which adapted it into a wide range of engineering problems, by heuristically searching for the optimal solution. Despite being well-defined, many engineering problems may suffer from heavy analytical entanglement when approaching the derivation process, as required in classic optimization methods. Therefore, the main motivation here, is to work around that obstacle. In this piece of work, I would like to harness the GA capabilities to examine optimality with respect to a unique combustion problem, in a way that was never performed before. To be more precise, I would like to utilize it to answer the question : What form of an initial droplet size distribution (iDSD) will guarantee an optimal flame ? To answer this question, I will first provide a general introduction to the GA method, then develop the combustion model, and eventually merge both into an optimization problem.