 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePLaMo 2 Technical Report
Sep 05, 2025In this report, we introduce PLaMo 2, a series of Japanese-focused large language models featuring a hybrid Samba-based architecture that transitions to full attention via continual pre-training to support 32K token contexts. Training leverages extensive synthetic corpora to overcome data scarcity, while computational efficiency is achieved through weight reuse and structured pruning. This efficient pruning methodology produces an 8B model that achieves performance comparable to our previous 100B model. Post-training further refines the models using a pipeline of supervised fine-tuning (SFT) and direct preference optimization (DPO), enhanced by synthetic Japanese instruction data and model merging techniques. Optimized for inference using vLLM and quantization with minimal accuracy loss, the PLaMo 2 models achieve state-of-the-art results on Japanese benchmarks, outperforming similarly-sized open models in instruction-following, language fluency, and Japanese-specific knowledge.
Cloth Manipulation Planning on Basis of Mesh Representations with Incomplete Domain Knowledge and Voxel-to-Mesh Estimation
Mar 15, 2021
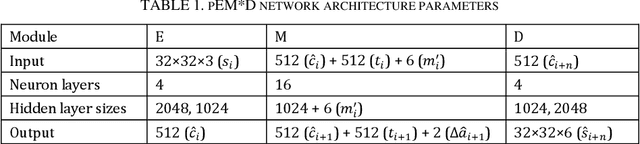
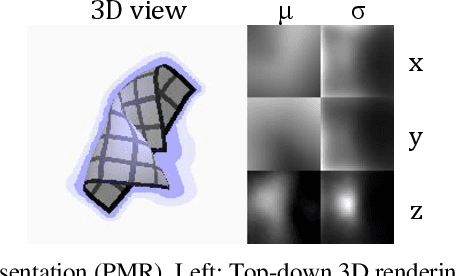
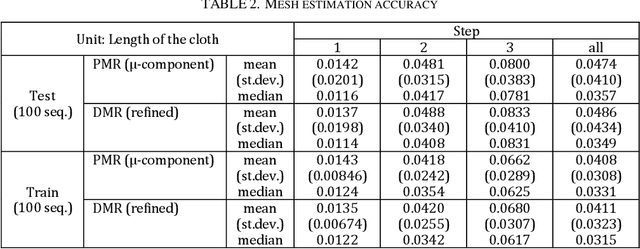
We consider the problem of open-goal planning for robotic cloth manipulation. Core of our system is a neural network trained as a forward model of cloth behaviour under manipulation, with planning performed through backpropagation. We introduce a neural network-based routine for estimating mesh representations from voxel input, and perform planning in mesh format internally. We address the problem of planning with incomplete domain knowledge by means of an explicit epistemic uncertainty signal. This signal is calculated from prediction divergence between two instances of the forward model network and used to avoid epistemic uncertainty during planning. Finally, we introduce logic for handling restriction of grasp points to a discrete set of candidates, in order to accommodate graspability constraints imposed by robotic hardware. We evaluate the system's mesh estimation, prediction, and planning ability on simulated cloth for sequences of one to three manipulations. Comparative experiments confirm that planning on basis of estimated meshes improves accuracy compared to voxel-based planning, and that epistemic uncertainty avoidance improves performance under conditions of incomplete domain knowledge. We additionally present qualitative results on robot hardware.