 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent Interval Modulation: A Novel Scheme for Event-based Optical Camera Communication
Oct 16, 2025Optical camera communication (OCC) represents a promising visible light communication technology. Nonetheless, typical OCC systems utilizing frame-based cameras are encumbered by limitations, including low bit rate and high processing load. To address these issues, OCC system utilizing an event-based vision sensor (EVS) as receivers have been proposed. The EVS enables high-speed, low-latency, and robust communication due to its asynchronous operation and high dynamic range. In existing event-based OCC systems, conventional modulation schemes such as on-off keying (OOK) and pulse position modulation have been applied, however, to the best of our knowledge, no modulation method has been proposed that fully exploits the unique characteristics of the EVS. This paper proposes a novel modulation scheme, called the event interval modulation (EIM) scheme, specifically designed for event-based OCC. EIM enables improvement in transmission speed by modulating information using the intervals between events. This paper proposes a theoretical model of EIM and conducts a proof-of-concept experiment. First, the parameters of the EVS are tuned and customized to optimize the frequency response specifically for EIM. Then, the maximum modulation order usable in EIM is determined experimentally. We conduct transmission experiments based on the obtained parameters. Finally, we report successful transmission at 28 kbps over 10 meters and 8.4 kbps over 50 meters in an indoor environment. This sets a new benchmark for bit rate in event-based OCC systems.
Experimental Demonstration of Event-based Optical Camera Communication in Long-Range Outdoor Environment
Oct 16, 2025We propose a robust demodulation scheme for optical camera communication systems using an event-based vision sensor, combining OOK with toggle demodulation and a digital phase-locked loop. This is the first report to achieve a $\mathrm{BER} < 10^{-3}$ at 200m-60kbps and 400m-30kbps in outdoor experiments.
First Demonstration of 512-Color Shift Keying Signal Demodulation Using Neural Equalization for Optical Camera Communication
Dec 29, 2022This paper experimentally demonstrates 512 color shift keying (CSK) signal transmission for optical camera communication (OCC). We achieved error-free operation with a CMOS image sensor module and a multi-label classification neural network-based equalizer.
Drone Positioning for Visible Light Communication with Drone-Mounted LED and Camera
Oct 30, 2020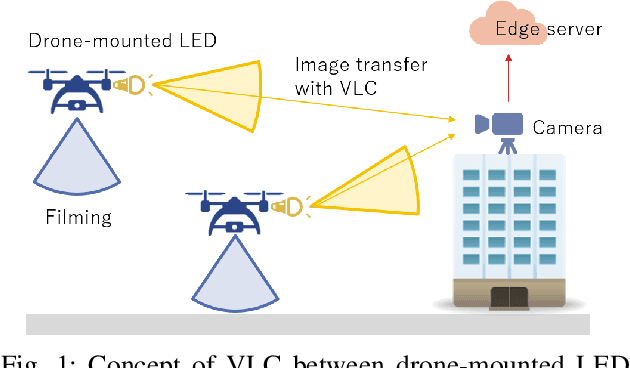
The world is often stricken by catastrophic disasters. On-demand drone-mounted visible light communication (VLC) networks are suitable for monitoring disaster-stricken areas for leveraging disaster-response operations. The concept of an image sensor-based VLC has also attracted attention in the recent past for establishing stable links using unstably moving drones. However, existing works did not sufficiently consider the one-to-many image sensor-based VLC system. Thus, this paper proposes the concept of a one-to-many image sensor-based VLC between a camera and multiple drone-mounted LED lights with a drone-positioning algorithm to avoid interference among VLC links. Multiple drones are deployed on-demand in a disaster-stricken area to monitor the ground and continuously send image data to a camera with image sensor-based visible light communication (VLC) links. The proposed idea is demonstrated with the proof-of-concept (PoC) implemented with drones that are equipped with LED panels and a 4K camera. As a result, we confirmed the feasibility of the proposed system.