 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Rebar Endpoints using Sin Exponential Regression Model
Oct 18, 2021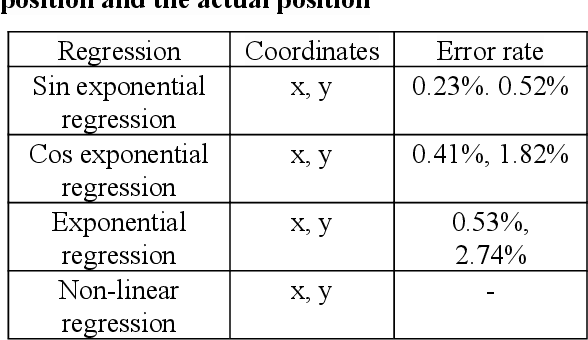
Currently, unmanned automation studies are underway to minimize the loss rate of rebar production and the time and accuracy of calibration when producing defective products in the cutting process of processing rebar factories. In this paper, we propose a method to detect and track rebar endpoint images entering the machine vision camera based on YOLO (You Only Look Once)v3, and to predict rebar endpoint in advance with sin exponential regression of acquired coordinates. The proposed method solves the problem of large prediction error rates for frame locations where rebar endpoints are far away in OPPDet (Object Position Prediction Detect) models, which prepredict rebar endpoints with improved results showing 0.23 to 0.52% less error rates at sin exponential regression prediction points.
Adversarial Scene Reconstruction and Object Detection System for Assisting Autonomous Vehicle
Oct 13, 2021



In the current computer vision era classifying scenes through video surveillance systems is a crucial task. Artificial Intelligence (AI) Video Surveillance technologies have been advanced remarkably while artificial intelligence and deep learning ascended into the system. Adopting the superior compounds of deep learning visual classification methods achieved enormous accuracy in classifying visual scenes. However, the visual classifiers face difficulties examining the scenes in dark visible areas, especially during the nighttime. Also, the classifiers face difficulties in identifying the contexts of the scenes. This paper proposed a deep learning model that reconstructs dark visual scenes to clear scenes like daylight, and the method recognizes visual actions for the autonomous vehicle. The proposed model achieved 87.3 percent accuracy for scene reconstruction and 89.2 percent in scene understanding and detection tasks.