 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient HTN to STRIPS Encoding for Concurrent Plans
Jun 14, 2022
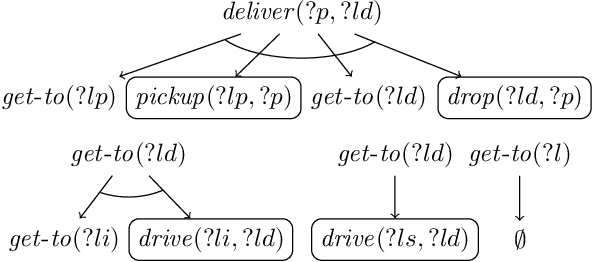
The Hierarchical Task Network (HTN) formalism is used to express a wide variety of planning problems in terms of decompositions of tasks into subtaks. Many techniques have been proposed to solve such hierarchical planning problems. A particular technique is to encode hierarchical planning problems as classical STRIPS planning problems. One advantage of this technique is to benefit directly from the constant improvements made by STRIPS planners. However, there are still few effective and expressive encodings. In this paper, we present a new HTN to STRIPS encoding allowing to generate concurrent plans. We show experimentally that this encoding outperforms previous approaches on hierarchical IPC benchmarks.
An Accurate HDDL Domain Learning Algorithm from Partial and Noisy Observations
Jun 14, 2022
The Hierarchical Task Network ({\sf HTN}) formalism is very expressive and used to express a wide variety of planning problems. In contrast to the classical {\sf STRIPS} formalism in which only the action model needs to be specified, the {\sf HTN} formalism requires to specify, in addition, the tasks of the problem and their decomposition into subtasks, called {\sf HTN} methods. For this reason, hand-encoding {\sf HTN} problems is considered more difficult and more error-prone by experts than classical planning problem. To tackle this problem, we propose a new approach (HierAMLSI) based on grammar induction to acquire {\sf HTN} planning domain knowledge, by learning action models and {\sf HTN} methods with their preconditions. Unlike other approaches, HierAMLSI is able to learn both actions and methods with noisy and partial inputs observation with a high level or accuracy.
HDDL 2.1: Towards Defining an HTN Formalism with Time
Jun 03, 2022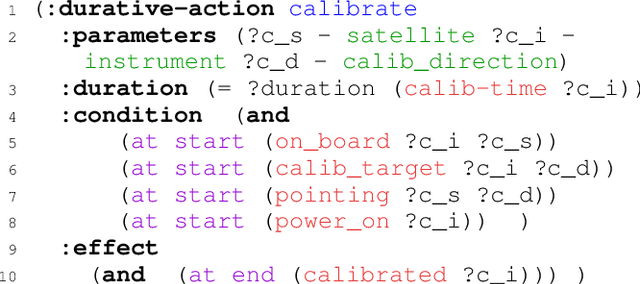
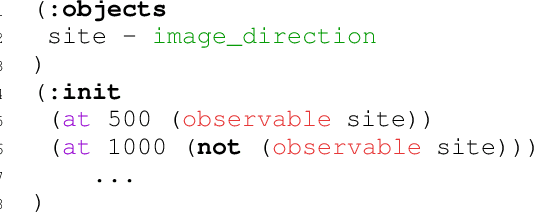
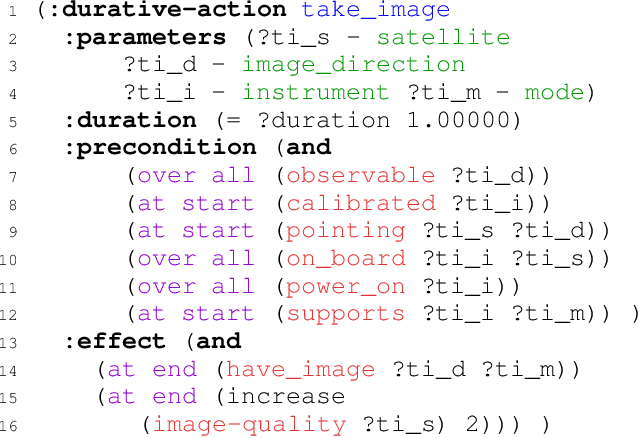
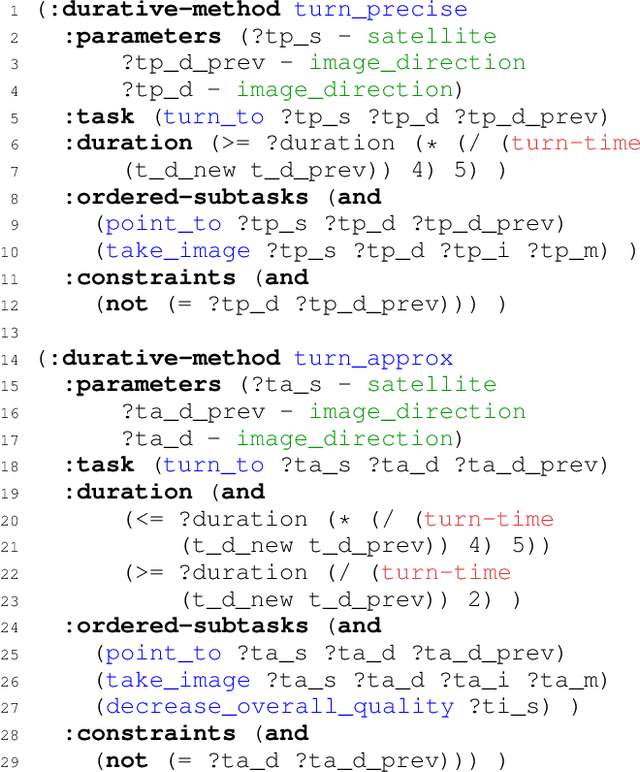
Real world applications of planning, like in industry and robotics, require modelling rich and diverse scenarios. Their resolution usually requires coordinated and concurrent action executions. In several cases, such planning problems are naturally decomposed in a hierarchical way and expressed by a Hierarchical Task Network (HTN) formalism. The PDDL language used to specify planning domains has evolved to cover the different planning paradigms. However, formulating real and complex scenarios where numerical and temporal constraints concur in defining a solution is still a challenge. Our proposition aims at filling the gap between existing planning languages and operational needs. To do so, we propose to extend HDDL taking inspiration from PDDL 2.1 and ANML to express temporal and numerical expressions. This paper opens discussions on the semantics and the syntax needed to extend HDDL, and illustrate these needs with the modelling of an Earth Observing Satellite planning problem.
HDDL -- A Language to Describe Hierarchical Planning Problems
Nov 13, 2019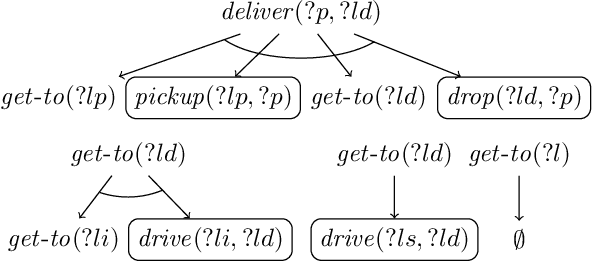
The research in hierarchical planning has made considerable progress in the last few years. Many recent systems do not rely on hand-tailored advice anymore to find solutions, but are supposed to be domain-independent systems that come with sophisticated solving techniques. In principle, this development would make the comparison between systems easier (because the domains are not tailored to a single system anymore) and -- much more important -- also the integration into other systems, because the modeling process is less tedious (due to the lack of advice) and there is no (or less) commitment to a certain planning system the model is created for. However, these advantages are destroyed by the lack of a common input language and feature set supported by the different systems. In this paper, we propose an extension to PDDL, the description language used in non-hierarchical planning, to the needs of hierarchical planning systems. We restrict our language to a basic feature set shared by many recent systems, give an extension of PDDL's EBNF syntax definition, and discuss our extensions with respect to several planner-specific input languages from related work.
Hierarchical Planning in the IPC
Sep 10, 2019
Over the last year, the amount of research in hierarchical planning has increased, leading to significant improvements in the performance of planners. However, the research is diverging and planners are somewhat hard to compare against each other. This is mostly caused by the fact that there is no standard set of benchmark domains, nor even a common description language for hierarchical planning problems. As a consequence, the available planners support a widely varying set of features and (almost) none of them can solve (or even parse) any problem developed for another planner. With this paper, we propose to create a new track for the IPC in which hierarchical planners will compete. This competition will result in a standardised description language, broader support for core features of that language among planners, a set of benchmark problems, a means to fairly and objectively compare HTN planners, and for new challenges for planners.