 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLightmorphic Signatures Analysis Toolkit
Dec 31, 2022In this paper we discuss the theory used in the design of an open source lightmorphic signatures analysis toolkit (LSAT). In addition to providing a core functionality, the software package enables specific optimizations with its modular and customizable design. To promote its usage and inspire future contributions, LSAT is publicly available. By using a self-supervised neural network and augmented machine learning algorithms, LSAT provides an easy-to-use interface with ample documentation. The experiments demonstrate that LSAT improves the otherwise tedious and error-prone tasks of translating lightmorphic associated data into usable spectrograms, enhanced with parameter tuning and performance analysis. With the provided mathematical functions, LSAT validates the nonlinearity encountered in the data conversion process while ensuring suitability of the forecasting algorithms.
Vehicle predictive trajectory patterns from isochronous data
Oct 10, 2020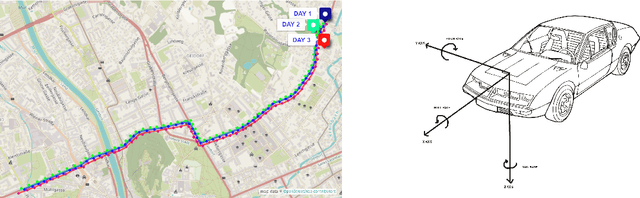
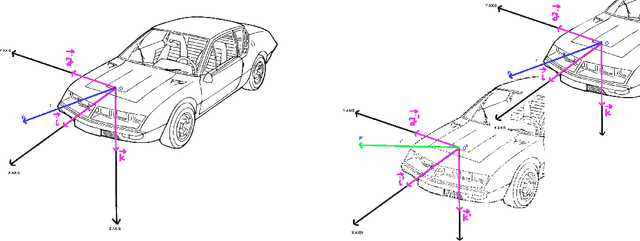
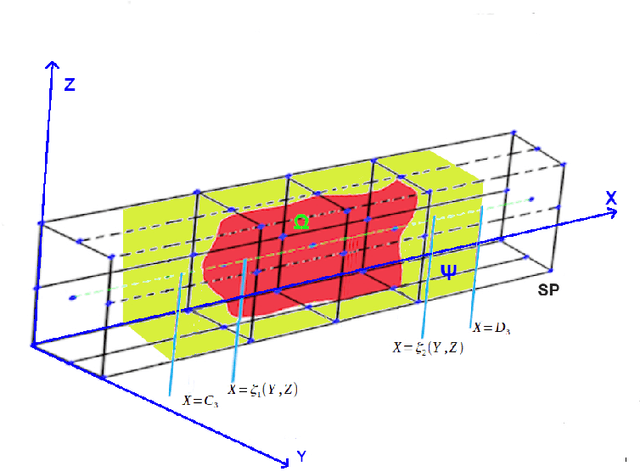
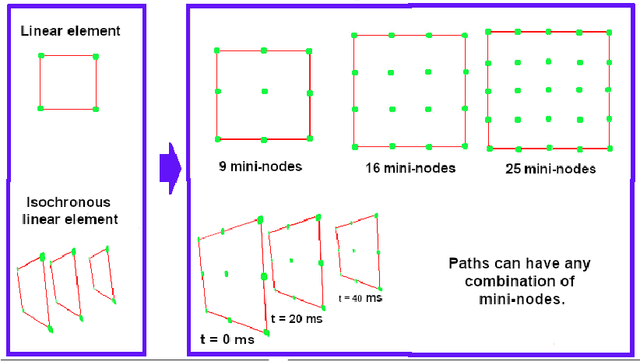
Measuring and analysing sensor data is the basic technique in vehicle dynamics development and with the advancement of embedded and data acquisition systems it is possible to analyze large data sets. In this paper a detailed method is presented for assessing and mapping isochronous trajectory patterns in Graz (Austria) by using data fusion from video, ArduinoUno and the compass sensor HDMM01. The predictive isochronous trajectory patterns are derived from the data values for a pre-defined time horizon. Both extreme driving behaviour and hazardous road geometries can be identified. It is possible to provide instant road sensor data which can be used to compare the data from a trajectory path as well as for different time instances. Results of this study show that the trajectory patterns are successful in predicting the likely evolution of a current trajectory pattern and can provide assessment on future driving situations. The obtained data from this study can be useful as reference in future city planning for energy saving driving pathways as well as vehicle design and engineering improvements based on quantitative and relevant dynamic measurements.