 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedRecNet: Multi-task deep neural network for full 3D human pose and orientation estimation
Apr 25, 2022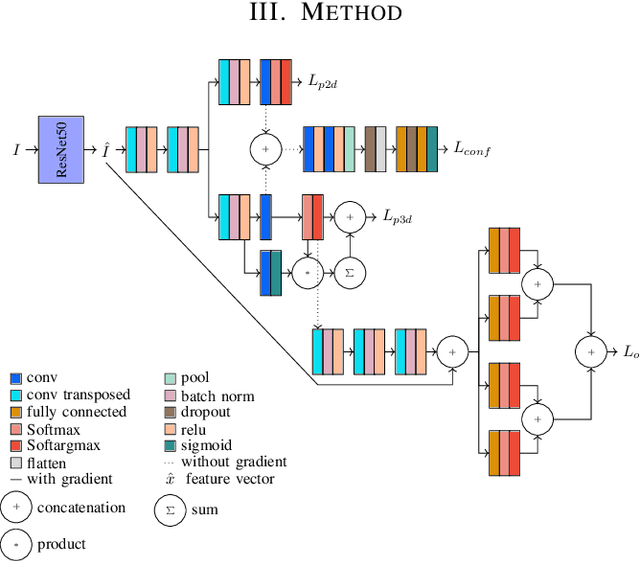
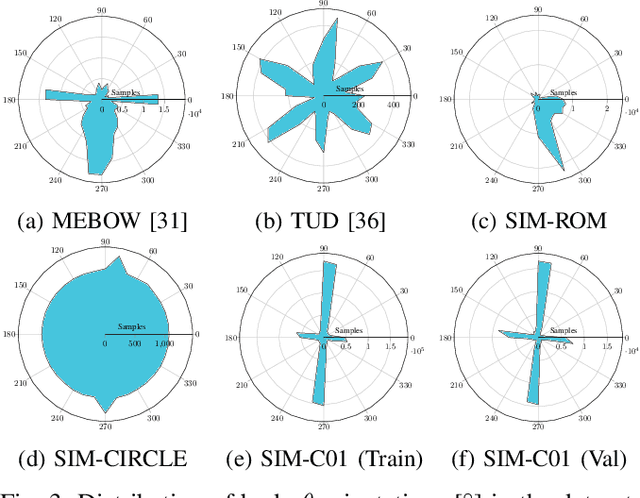
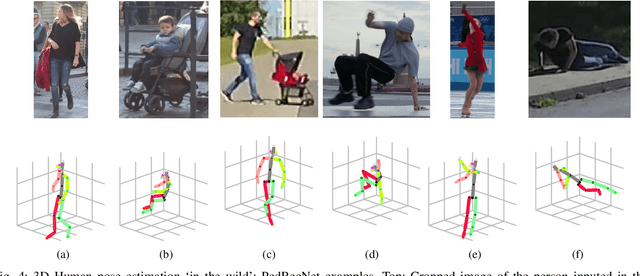
We present a multitask network that supports various deep neural network based pedestrian detection functions. Besides 2D and 3D human pose, it also supports body and head orientation estimation based on full body bounding box input. This eliminates the need for explicit face recognition. We show that the performance of 3D human pose estimation and orientation estimation is comparable to the state-of-the-art. Since very few data sets exist for 3D human pose and in particular body and head orientation estimation based on full body data, we further show the benefit of particular simulation data to train the network. The network architecture is relatively simple, yet powerful, and easily adaptable for further research and applications.
Simple yet efficient real-time pose-based action recognition
Apr 19, 2019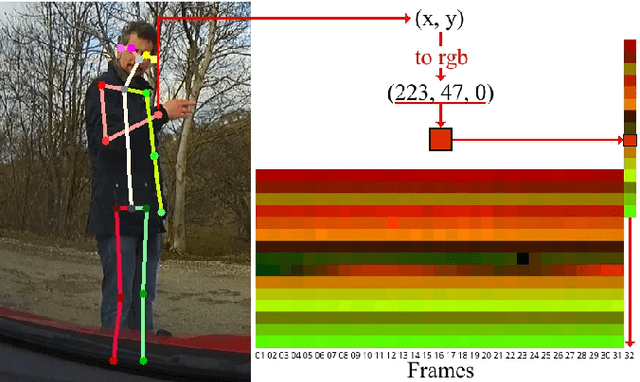
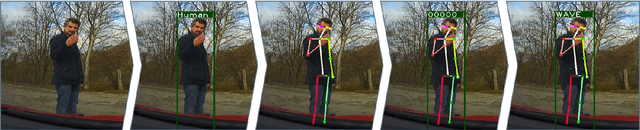
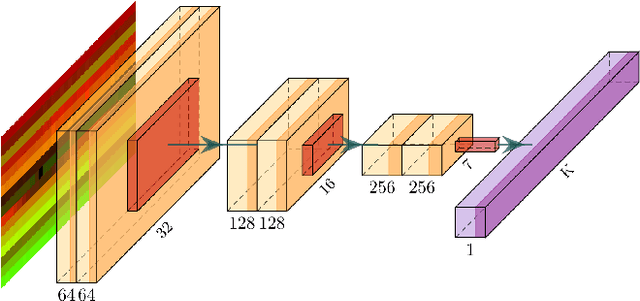
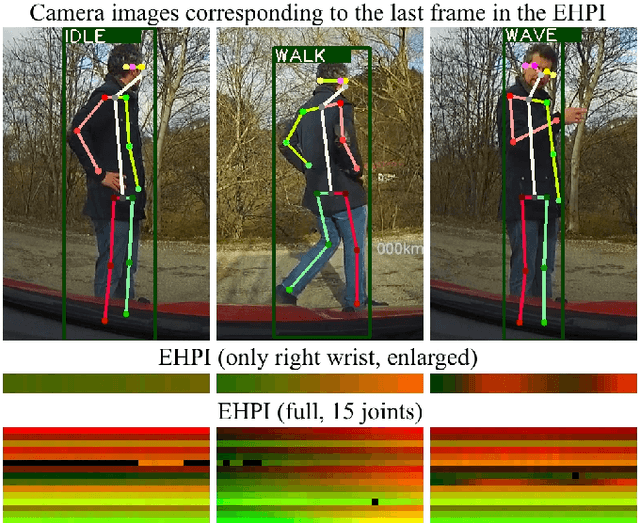
Recognizing human actions is a core challenge for autonomous systems as they directly share the same space with humans. Systems must be able to recognize and assess human actions in real-time. In order to train corresponding data-driven algorithms, a significant amount of annotated training data is required. We demonstrated a pipeline to detect humans, estimate their pose, track them over time and recognize their actions in real-time with standard monocular camera sensors. For action recognition, we encode the human pose into a new data format called Encoded Human Pose Image (EHPI) that can then be classified using standard methods from the computer vision community. With this simple procedure we achieve competitive state-of-the-art performance in pose-based action detection and can ensure real-time performance. In addition, we show a use case in the context of autonomous driving to demonstrate how such a system can be trained to recognize human actions using simulation data.