 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObserveNet Control: A Vision-Dynamics Learning Approach to Predictive Control in Autonomous Vehicles
Jul 19, 2021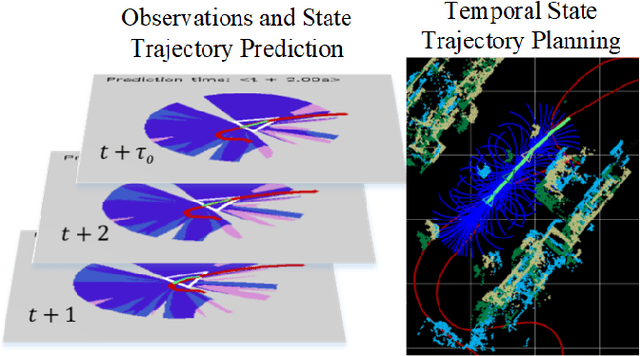
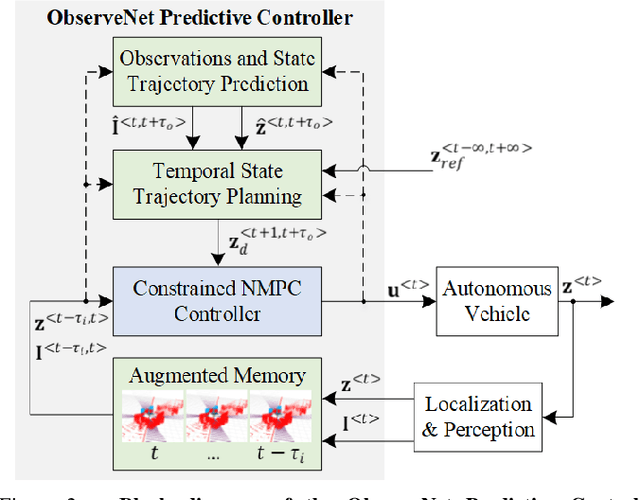
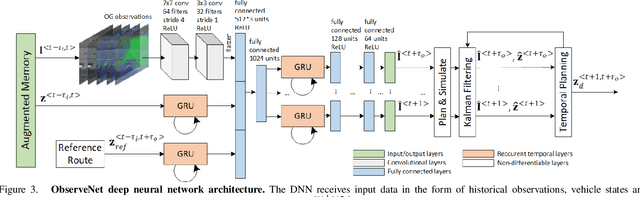
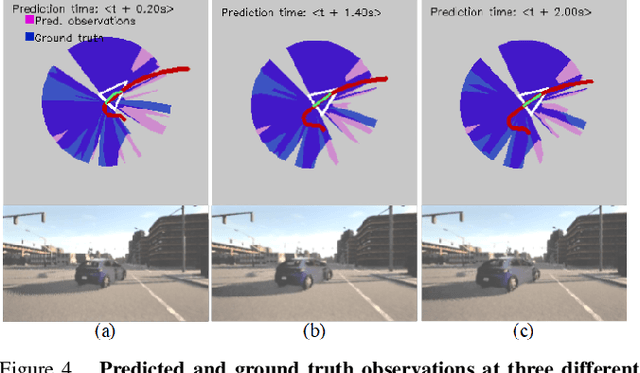
A key component in autonomous driving is the ability of the self-driving car to understand, track and predict the dynamics of the surrounding environment. Although there is significant work in the area of object detection, tracking and observations prediction, there is no prior work demonstrating that raw observations prediction can be used for motion planning and control. In this paper, we propose ObserveNet Control, which is a vision-dynamics approach to the predictive control problem of autonomous vehicles. Our method is composed of a: i) deep neural network able to confidently predict future sensory data on a time horizon of up to 10s and ii) a temporal planner designed to compute a safe vehicle state trajectory based on the predicted sensory data. Given the vehicle's historical state and sensing data in the form of Lidar point clouds, the method aims to learn the dynamics of the observed driving environment in a self-supervised manner, without the need to manually specify training labels. The experiments are performed both in simulation and real-life, using CARLA and RovisLab's AMTU mobile platform as a 1:4 scaled model of a car. We evaluate the capabilities of ObserveNet Control in aggressive driving contexts, such as overtaking maneuvers or side cut-off situations, while comparing the results with a baseline Dynamic Window Approach (DWA) and two state-of-the-art imitation learning systems, that is, Learning by Cheating (LBC) and World on Rails (WOR).
OctoPath: An OcTree Based Self-Supervised Learning Approach to Local Trajectory Planning for Mobile Robots
Jun 02, 2021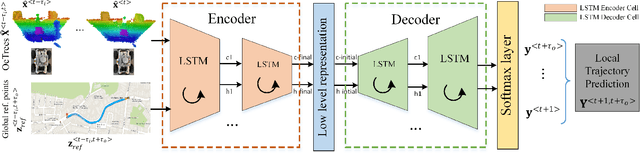
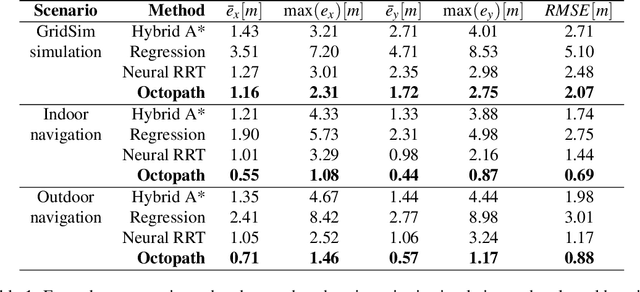
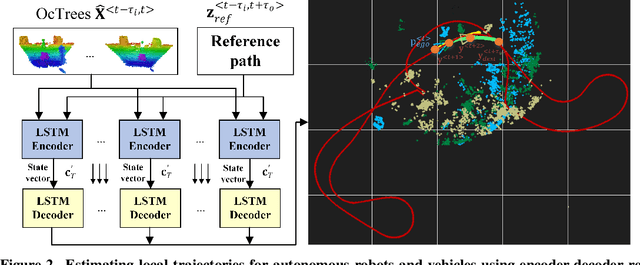
Autonomous mobile robots are usually faced with challenging situations when driving in complex environments. Namely, they have to recognize the static and dynamic obstacles, plan the driving path and execute their motion. For addressing the issue of perception and path planning, in this paper, we introduce OctoPath , which is an encoder-decoder deep neural network, trained in a self-supervised manner to predict the local optimal trajectory for the ego-vehicle. Using the discretization provided by a 3D octree environment model, our approach reformulates trajectory prediction as a classification problem with a configurable resolution. During training, OctoPath minimizes the error between the predicted and the manually driven trajectories in a given training dataset. This allows us to avoid the pitfall of regression-based trajectory estimation, in which there is an infinite state space for the output trajectory points. Environment sensing is performed using a 40-channel mechanical LiDAR sensor, fused with an inertial measurement unit and wheels odometry for state estimation. The experiments are performed both in simulation and real-life, using our own developed GridSim simulator and RovisLab's Autonomous Mobile Test Unit platform. We evaluate the predictions of OctoPath in different driving scenarios, both indoor and outdoor, while benchmarking our system against a baseline hybrid A-Star algorithm and a regression-based supervised learning method, as well as against a CNN learning-based optimal path planning method.
LVD-NMPC: A Learning-based Vision Dynamics Approach to Nonlinear Model Predictive Control for Autonomous Vehicles
May 27, 2021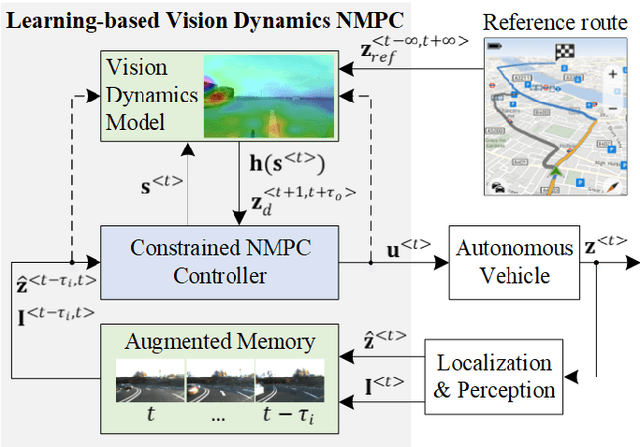
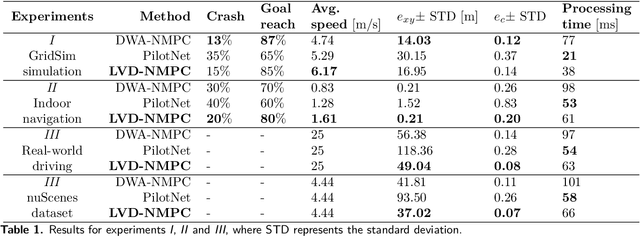
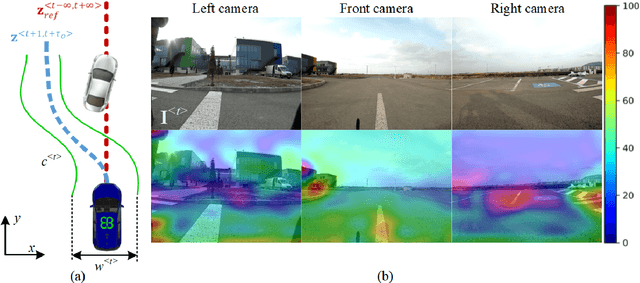
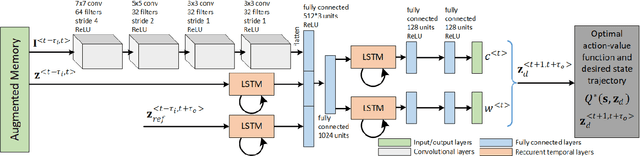
In this paper, we introduce a learning-based vision dynamics approach to nonlinear model predictive control for autonomous vehicles, coined LVD-NMPC. LVD-NMPC uses an a-priori process model and a learned vision dynamics model used to calculate the dynamics of the driving scene, the controlled system's desired state trajectory and the weighting gains of the quadratic cost function optimized by a constrained predictive controller. The vision system is defined as a deep neural network designed to estimate the dynamics of the images scene. The input is based on historic sequences of sensory observations and vehicle states, integrated by an Augmented Memory component. Deep Q-Learning is used to train the deep network, which once trained can be used to also calculate the desired trajectory of the vehicle. We evaluate LVD-NMPC against a baseline Dynamic Window Approach (DWA) path planning executed using standard NMPC, as well as against the PilotNet neural network. Performance is measured in our simulation environment GridSim, on a real-world 1:8 scaled model car, as well as on a real size autonomous test vehicle and the nuScenes computer vision dataset.
Embedded Vision for Self-Driving on Forest Roads
May 27, 2021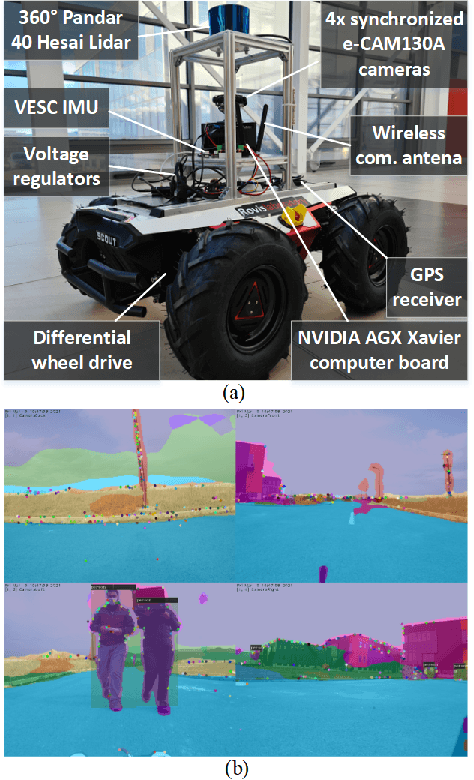
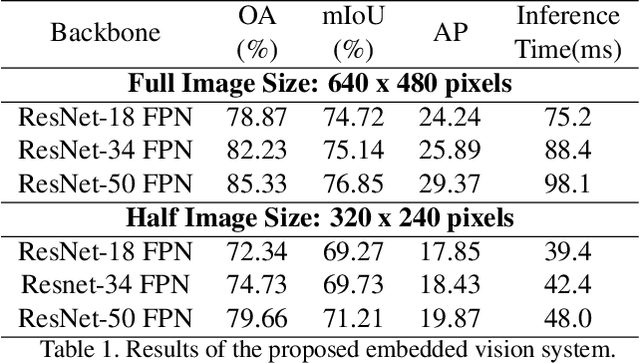
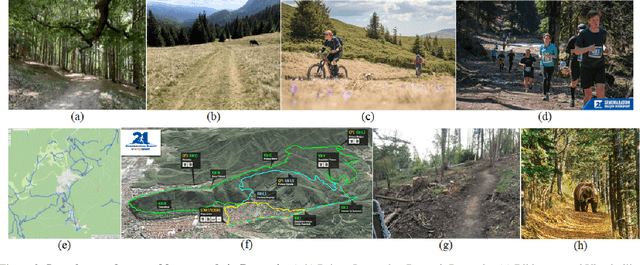
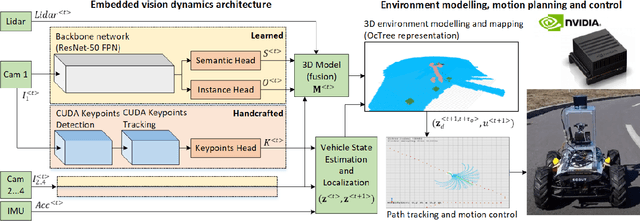
Forest roads in Romania are unique natural wildlife sites used for recreation by countless tourists. In order to protect and maintain these roads, we propose RovisLab AMTU (Autonomous Mobile Test Unit), which is a robotic system designed to autonomously navigate off-road terrain and inspect if any deforestation or damage occurred along tracked route. AMTU's core component is its embedded vision module, optimized for real-time environment perception. For achieving a high computation speed, we use a learning system to train a multi-task Deep Neural Network (DNN) for scene and instance segmentation of objects, while the keypoints required for simultaneous localization and mapping are calculated using a handcrafted FAST feature detector and the Lucas-Kanade tracking algorithm. Both the DNN and the handcrafted backbone are run in parallel on the GPU of an NVIDIA AGX Xavier board. We show experimental results on the test track of our research facility.