 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMiti360: A Comprehensive Dataset for Improved Reforestation Monitoring
Jun 28, 2026Over the past decade, interest in applying machine learning (ML) to automate forest monitoring has grown significantly. However, existing training datasets are predominantly drawn from North America, Europe, Asia, and Australia, leaving a critical gap in African forestry data. To address this limited geographic diversity, we present Miti360, a comprehensive dataset for reforestation monitoring that comprises high-resolution imagery, ground truth data, and longitudinal weather data. Data collection occurred within a 770-ha reforested section of the Kieni Forest in Kenya between March 2023 and February 2025. Miti360 comprises aerial photos (orthophotos and tiles) with tree bounding box annotations, terrestrial images (single and stereo), and detailed data records including tree biophysical parameters, species, and GPS coordinates, alongside historical weather data. Aerial surveys utilized a DJI Mavic 2 Pro, with imagery stitched via Agisoft Metashape and tiled using ArcGIS Pro, while terrestrial captures used smartphones and custom stereo cameras. Miti360 enables the training of ML systems for tasks such as accelerating tree censuses, matching species to geographical areas, modelling growth based on weather conditions, and developing digital twin frameworks. Models can be trained on Miti360 to address challenges specific to Sub-Saharan Africa, ultimately advancing reforestation monitoring and fostering sustainable forestry practices in underrepresented regions. We demonstrate the utility of this dataset by successfully tracking tree crowns across three years and improving the DeepForest model's box precision and box recall by 12% and 69% respectively through fine-tuning on Miti360.
AfriVoices-KE: A Multilingual Speech Dataset for Kenyan Languages
Apr 09, 2026AfriVoices-KE is a large-scale multilingual speech dataset comprising approximately 3,000 hours of audio across five Kenyan languages: Dholuo, Kikuyu, Kalenjin, Maasai, and Somali. The dataset includes 750 hours of scripted speech and 2,250 hours of spontaneous speech, collected from 4,777 native speakers across diverse regions and demographics. This work addresses the critical underrepresentation of African languages in speech technology by providing a high-quality, linguistically diverse resource. Data collection followed a dual methodology: scripted recordings drew from compiled text corpora, translations, and domain-specific generated sentences spanning eleven domains relevant to the Kenyan context, while unscripted speech was elicited through textual and image prompts to capture natural linguistic variation and dialectal nuances. A customized mobile application enabled contributors to record using smartphones. Quality assurance operated at multiple layers, encompassing automated signal-to-noise ratio validation prior to recording and human review for content accuracy. Though the project encountered challenges common to low-resource settings, including unreliable infrastructure, device compatibility issues, and community trust barriers, these were mitigated through local mobilizers, stakeholder partnerships, and adaptive training protocols. AfriVoices-KE provides a foundational resource for developing inclusive automatic speech recognition and text-to-speech systems, while advancing the digital preservation of Kenya's linguistic heritage.
Perceptual Distortions and Autonomous Representation Learning in a Minimal Robotic System
Jul 10, 2025Autonomous agents, particularly in the field of robotics, rely on sensory information to perceive and navigate their environment. However, these sensory inputs are often imperfect, leading to distortions in the agent's internal representation of the world. This paper investigates the nature of these perceptual distortions and how they influence autonomous representation learning using a minimal robotic system. We utilize a simulated two-wheeled robot equipped with distance sensors and a compass, operating within a simple square environment. Through analysis of the robot's sensor data during random exploration, we demonstrate how a distorted perceptual space emerges. Despite these distortions, we identify emergent structures within the perceptual space that correlate with the physical environment, revealing how the robot autonomously learns a structured representation for navigation without explicit spatial information. This work contributes to the understanding of embodied cognition, minimal agency, and the role of perception in self-generated navigation strategies in artificial life.
An empirical investigation into audio pipeline approaches for classifying bird species
Aug 10, 2021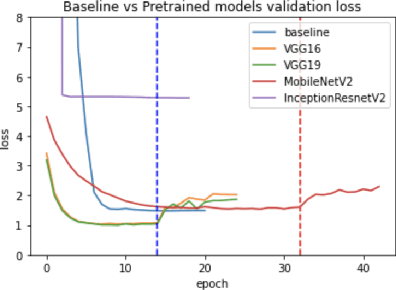
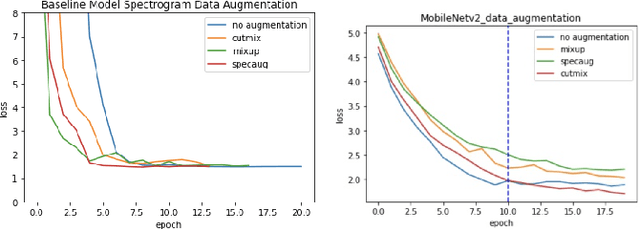
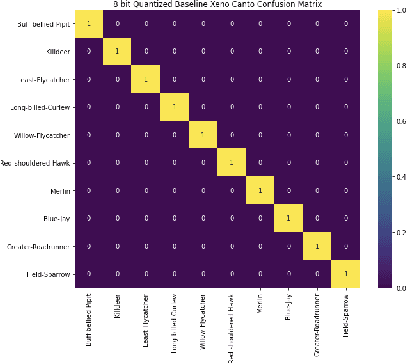
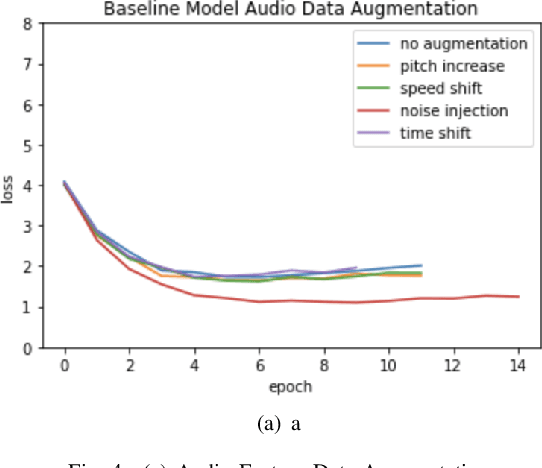
This paper is an investigation into aspects of an audio classification pipeline that will be appropriate for the monitoring of bird species on edges devices. These aspects include transfer learning, data augmentation and model optimization. The hope is that the resulting models will be good candidates to deploy on edge devices to monitor bird populations. Two classification approaches will be taken into consideration, one which explores the effectiveness of a traditional Deep Neural Network(DNN) and another that makes use of Convolutional layers.This study aims to contribute empirical evidence of the merits and demerits of each approach.