 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaffolded Gait Learning of a Quadruped Robot with Bayesian Optimization
Jan 25, 2021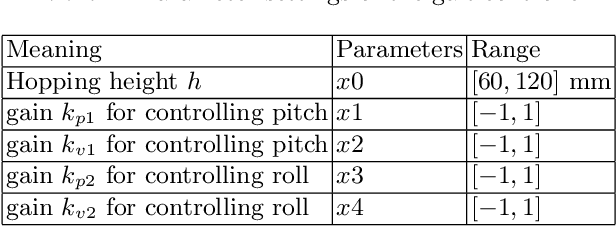
During learning trials, systems are exposed to different failure conditions which may break robotic parts before a safe behavior is discovered. Humans contour this problem by grounding their learning to a safer structure/control first and gradually increasing its difficulty. This paper presents the impact of a similar supports in the learning of a stable gait on a quadruped robot. Based on the psychological theory of instructional scaffolding, we provide different support settings to our robot, evaluated with strain gauges, and use Bayesian Optimization to conduct a parametric search towards a stable Raibert controller. We perform several experiments to measure the relation between constant supports and gradually reduced supports during gait learning, and our results show that a gradually reduced support is capable of creating a more stable gait than a support at a fixed height. Although gaps between simulation and reality can lead robots to catastrophic failures, our proposed method combines speed and safety when learning a new behavior.