 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-informed offline reinforcement learning eliminates catastrophic fuel waste in maritime routing
Mar 18, 2026International shipping produces approximately 3% of global greenhouse gas emissions, yet voyage routing remains dominated by heuristic methods. We present PIER (Physics-Informed, Energy-efficient, Risk-aware routing), an offline reinforcement learning framework that learns fuel-efficient, safety-aware routing policies from physics-calibrated environments grounded in historical vessel tracking data and ocean reanalysis products, requiring no online simulator. Validated on one full year (2023) of AIS data across seven Gulf of Mexico routes (840 episodes per method), PIER reduces mean CO2 emissions by 10% relative to great-circle routing. However, PIER's primary contribution is eliminating catastrophic fuel waste: great-circle routing incurs extreme fuel consumption (>1.5x median) in 4.8% of voyages; PIER reduces this to 0.5%, a 9-fold reduction. Per-voyage fuel variance is 3.5x lower (p<0.001), with bootstrap 95% CI for mean savings [2.9%, 15.7%]. Partial validation against observed AIS vessel behavior confirms consistency with the fastest real transits while exhibiting 23.1x lower variance. Crucially, PIER is forecast-independent: unlike A* path optimization whose wave protection degrades 4.5x under realistic forecast uncertainty, PIER maintains constant performance using only local observations. The framework combines physics-informed state construction, demonstration-augmented offline data, and a decoupled post-hoc safety shield, an architecture that transfers to wildfire evacuation, aircraft trajectory optimization, and autonomous navigation in unmapped terrain.
Learning functionals via LSTM neural networks for predicting vessel dynamics in extreme sea states
Dec 23, 2019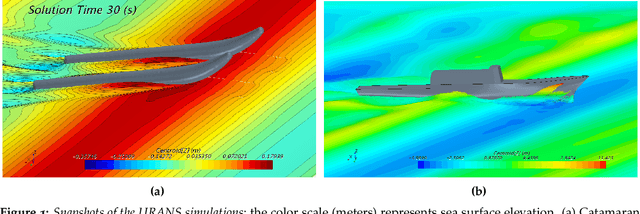
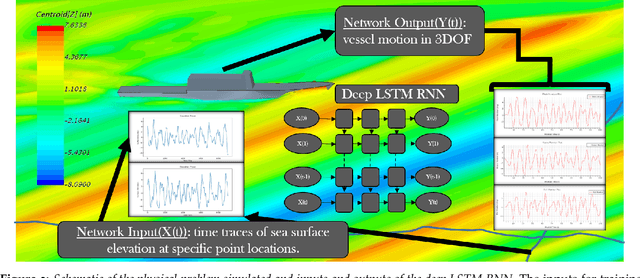
Predicting motions of vessels in extreme sea states represents one of the most challenging problems in naval hydrodynamics. It involves computing complex nonlinear wave-body interactions, hence taxing heavily computational resources. Here, we put forward a new simulation paradigm by training recurrent type neural networks (RNNs) that take as input the stochastic wave elevation at a certain sea state and output the main vessel motions, e.g., pitch, heave and roll. We first compare the performance of standard RNNs versus GRU and LSTM neural networks (NNs) and show that LSTM NNs lead to the best performance. We then examine the testing error of two representative vessels, a catamaran in sea state 1 and a battleship in sea state 8. We demonstrate that good accuracy is achieved for both cases in predicting the vessel motions for unseen wave elevations. We train the NNs with expensive CFD simulations offline, but upon training, the prediction of the vessel dynamics online can be obtained at a fraction of a second. This work is motivated by the universal approximation theorem for functionals [1], and it is the first implementation of such theory to realistic engineering problems.