 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation-Based Active Camera Control with Deep Convolutional Neural Network
Dec 11, 2020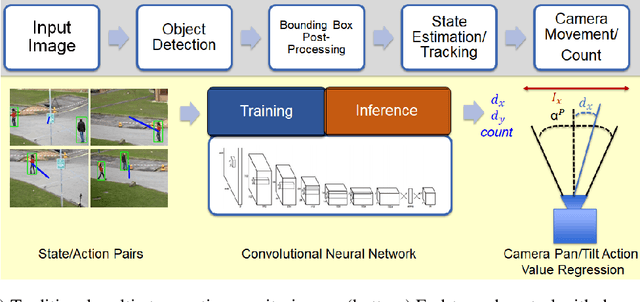
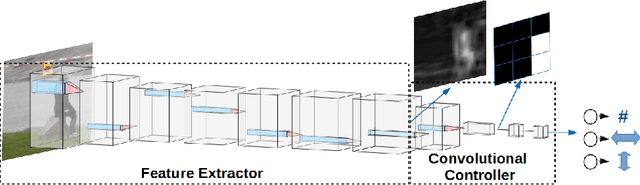
The increasing need for automated visual monitoring and control for applications such as smart camera surveillance, traffic monitoring, and intelligent environments, necessitates the improvement of methods for visual active monitoring. Traditionally, the active monitoring task has been handled through a pipeline of modules such as detection, filtering, and control. In this paper we frame active visual monitoring as an imitation learning problem to be solved in a supervised manner using deep learning, to go directly from visual information to camera movement in order to provide a satisfactory solution by combining computer vision and control. A deep convolutional neural network is trained end-to-end as the camera controller that learns the entire processing pipeline needed to control a camera to follow multiple targets and also estimate their density from a single image. Experimental results indicate that the proposed solution is robust to varying conditions and is able to achieve better monitoring performance both in terms of number of targets monitored as well as in monitoring time than traditional approaches, while reaching up to 25 FPS. Thus making it a practical and affordable solution for multi-target active monitoring in surveillance and smart-environment applications.
YOLOpeds: Efficient Real-Time Single-Shot Pedestrian Detection for Smart Camera Applications
Jul 27, 2020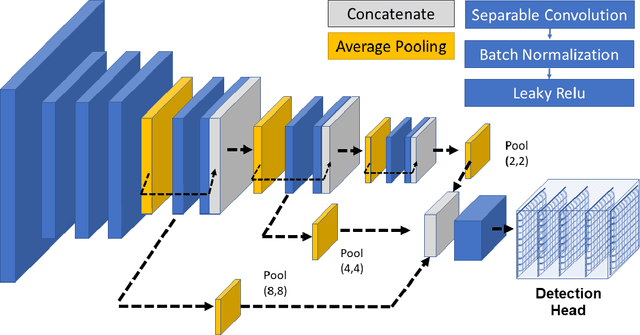

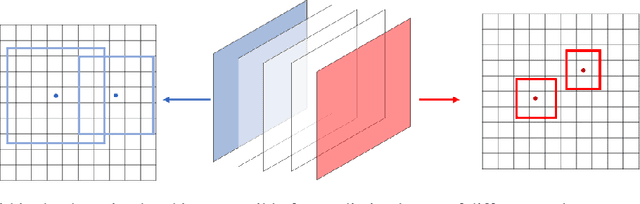
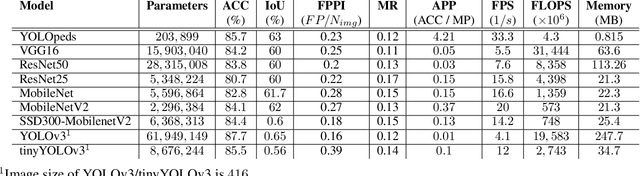
Deep Learning-based object detectors can enhance the capabilities of smart camera systems in a wide spectrum of machine vision applications including video surveillance, autonomous driving, robots and drones, smart factory, and health monitoring. Pedestrian detection plays a key role in all these applications and deep learning can be used to construct accurate state-of-the-art detectors. However, such complex paradigms do not scale easily and are not traditionally implemented in resource-constrained smart cameras for on-device processing which offers significant advantages in situations when real-time monitoring and robustness are vital. Efficient neural networks can not only enable mobile applications and on-device experiences but can also be a key enabler of privacy and security allowing a user to gain the benefits of neural networks without needing to send their data to the server to be evaluated. This work addresses the challenge of achieving a good trade-off between accuracy and speed for efficient deployment of deep-learning-based pedestrian detection in smart camera applications. A computationally efficient architecture is introduced based on separable convolutions and proposes integrating dense connections across layers and multi-scale feature fusion to improve representational capacity while decreasing the number of parameters and operations. In particular, the contributions of this work are the following: 1) An efficient backbone combining multi-scale feature operations, 2) a more elaborate loss function for improved localization, 3) an anchor-less approach for detection, The proposed approach called YOLOpeds is evaluated using the PETS2009 surveillance dataset on 320x320 images. Overall, YOLOpeds provides real-time sustained operation of over 30 frames per second with detection rates in the range of 86% outperforming existing deep learning models.
EdgeNet: Balancing Accuracy and Performance for Edge-based Convolutional Neural Network Object Detectors
Nov 14, 2019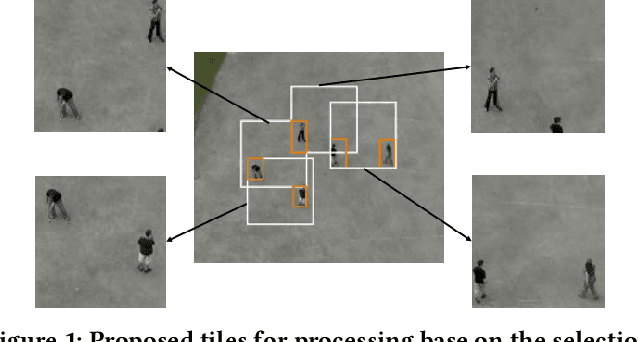
Visual intelligence at the edge is becoming a growing necessity for low latency applications and situations where real-time decision is vital. Object detection, the first step in visual data analytics, has enjoyed significant improvements in terms of state-of-the-art accuracy due to the emergence of Convolutional Neural Networks (CNNs) and Deep Learning. However, such complex paradigms intrude increasing computational demands and hence prevent their deployment on resource-constrained devices. In this work, we propose a hierarchical framework that enables to detect objects in high-resolution video frames, and maintain the accuracy of state-of-the-art CNN-based object detectors while outperforming existing works in terms of processing speed when targeting a low-power embedded processor using an intelligent data reduction mechanism. Moreover, a use-case for pedestrian detection from Unmanned-Areal-Vehicle (UAV) is presented showing the impact that the proposed approach has on sensitivity, average processing time and power consumption when is implemented on different platforms. Using the proposed selection process our framework manages to reduce the processed data by 100x leading to under 4W power consumption on different edge devices.
* George Plastiras, Christos Kyrkou, and Theocharis Theocharides. 2019. EdgeNet: Balancing Accuracy and Performance for Edge-based Convolutional Neural Network Object Detectors. In Proceedings of the 13th International Conference on Distributed Smart Cameras (ICDSC 2019). ACM, New York, NY, USA, Article 8, 6 pages
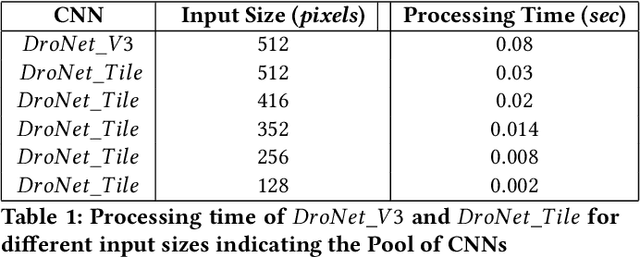
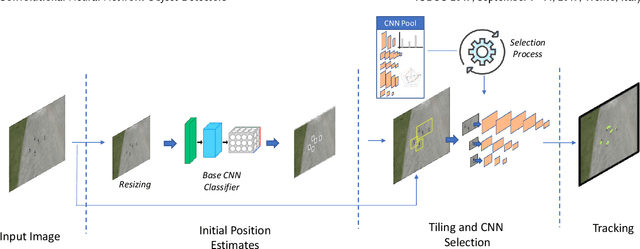
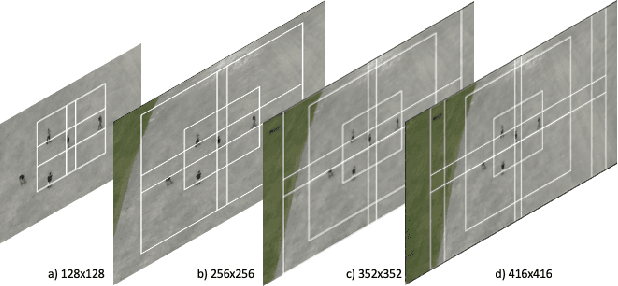
Efficient ConvNet-based Object Detection for Unmanned Aerial Vehicles by Selective Tile Processing
Nov 14, 2019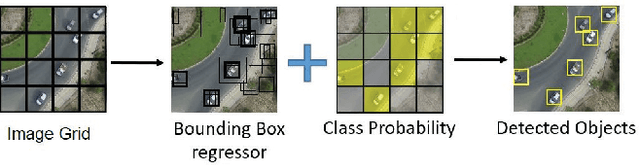
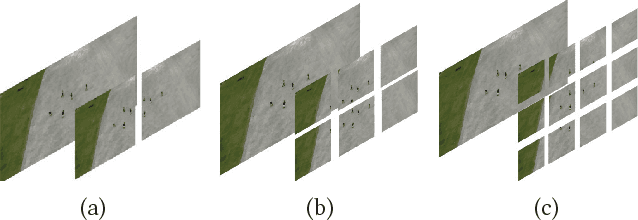
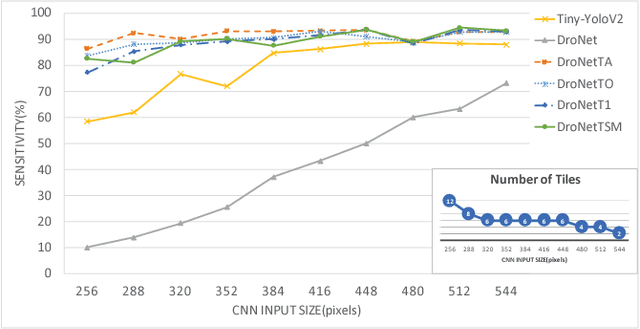
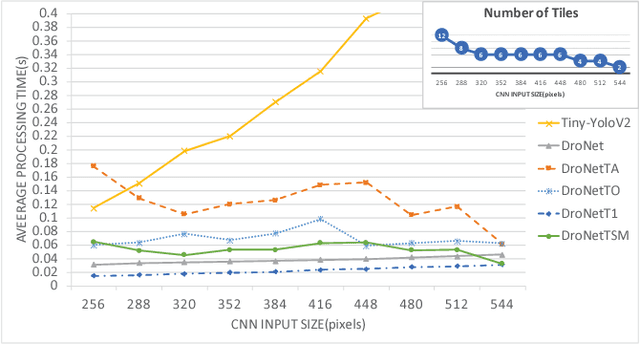
Many applications utilizing Unmanned Aerial Vehicles (UAVs) require the use of computer vision algorithms to analyze the information captured from their on-board camera. Recent advances in deep learning have made it possible to use single-shot Convolutional Neural Network (CNN) detection algorithms that process the input image to detect various objects of interest. To keep the computational demands low these neural networks typically operate on small image sizes which, however, makes it difficult to detect small objects. This is further emphasized when considering UAVs equipped with cameras where due to the viewing range, objects tend to appear relatively small. This paper therefore, explores the trade-offs involved when maintaining the resolution of the objects of interest by extracting smaller patches (tiles) from the larger input image and processing them using a neural network. Specifically, we introduce an attention mechanism to focus on detecting objects only in some of the tiles and a memory mechanism to keep track of information for tiles that are not processed. Through the analysis of different methods and experiments we show that by carefully selecting which tiles to process we can considerably improve the detection accuracy while maintaining comparable performance to CNNs that resize and process a single image which makes the proposed approach suitable for UAV applications.
* George Plastiras, Christos Kyrkou, and Theocharis Theocharides. 2018. Efficient ConvNet-based Object Detection for Unmanned Aerial Vehicles by Selective Tile Processing. In Proceedings of the 12th International Conference on Distributed Smart Cameras (ICDSC '18). ACM, New York, NY, USA, Article 3, 6 pages
Deep-Learning-Based Aerial Image Classification for Emergency Response Applications Using Unmanned Aerial Vehicles
Jun 20, 2019
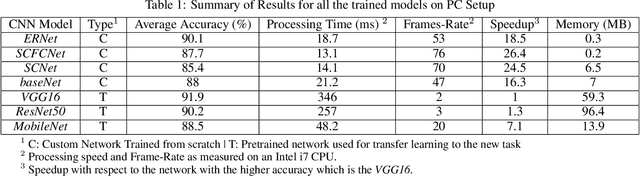
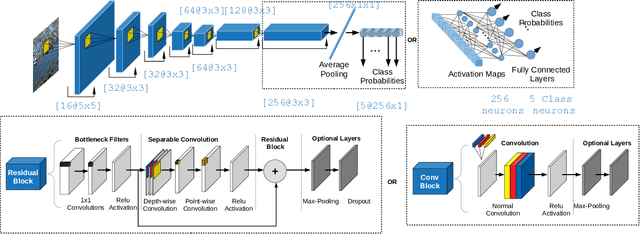
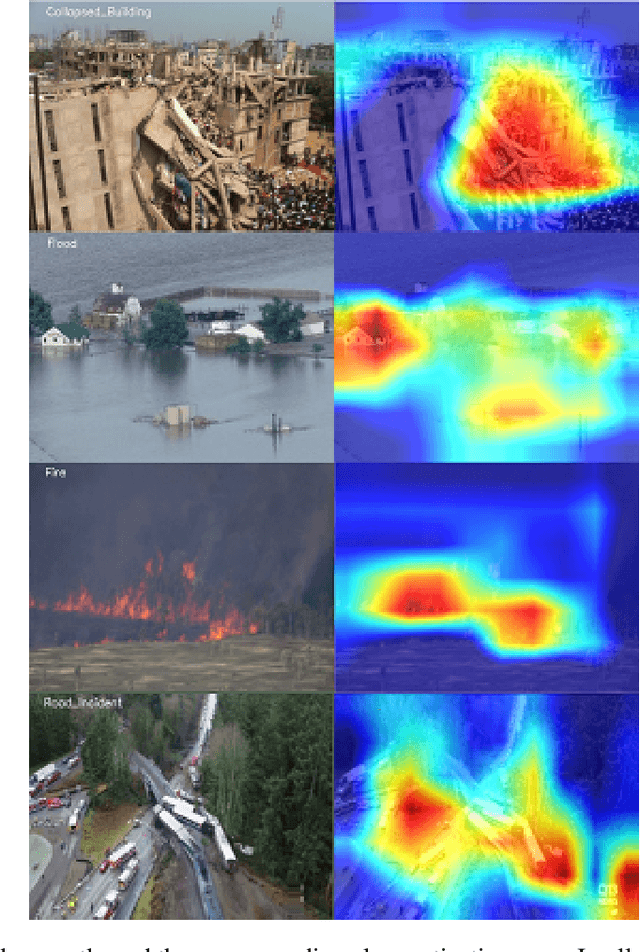
Unmanned Aerial Vehicles (UAVs), equipped with camera sensors can facilitate enhanced situational awareness for many emergency response and disaster management applications since they are capable of operating in remote and difficult to access areas. In addition, by utilizing an embedded platform and deep learning UAVs can autonomously monitor a disaster stricken area, analyze the image in real-time and alert in the presence of various calamities such as collapsed buildings, flood, or fire in order to faster mitigate their effects on the environment and on human population. To this end, this paper focuses on the automated aerial scene classification of disaster events from on-board a UAV. Specifically, a dedicated Aerial Image Database for Emergency Response (AIDER) applications is introduced and a comparative analysis of existing approaches is performed. Through this analysis a lightweight convolutional neural network (CNN) architecture is developed, capable of running efficiently on an embedded platform achieving ~3x higher performance compared to existing models with minimal memory requirements with less than 2% accuracy drop compared to the state-of-the-art. These preliminary results provide a solid basis for further experimentation towards real-time aerial image classification for emergency response applications using UAVs.
DroNet: Efficient convolutional neural network detector for real-time UAV applications
Jul 18, 2018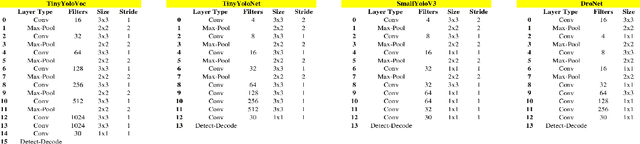
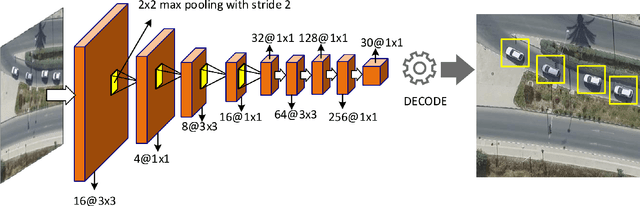
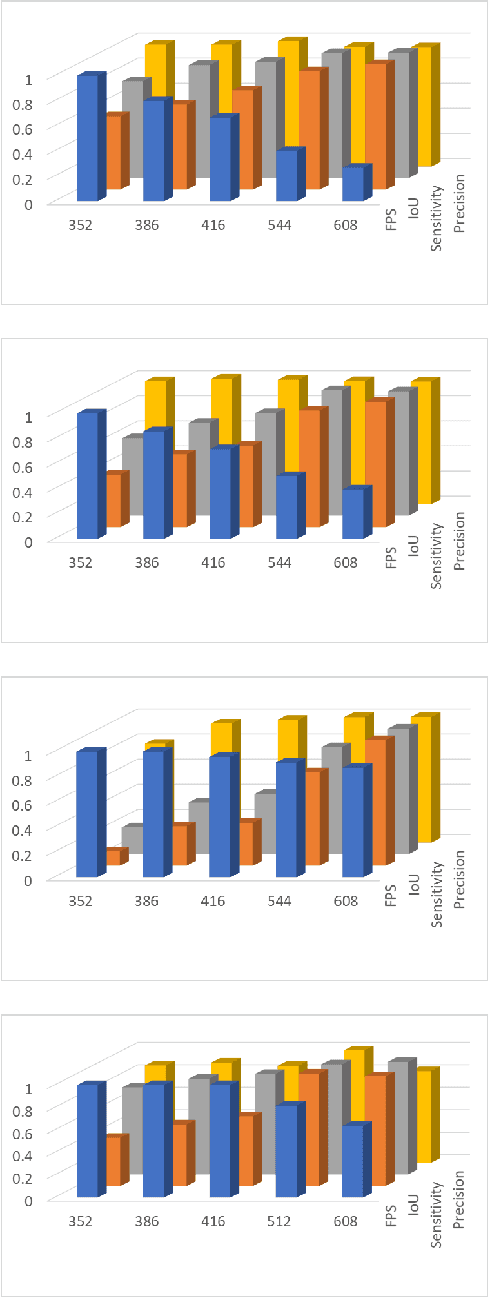
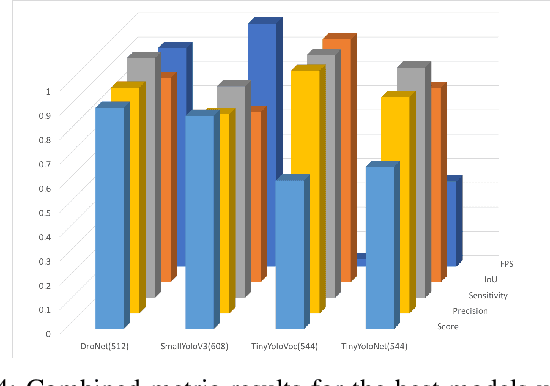
Unmanned Aerial Vehicles (drones) are emerging as a promising technology for both environmental and infrastructure monitoring, with broad use in a plethora of applications. Many such applications require the use of computer vision algorithms in order to analyse the information captured from an on-board camera. Such applications include detecting vehicles for emergency response and traffic monitoring. This paper therefore, explores the trade-offs involved in the development of a single-shot object detector based on deep convolutional neural networks (CNNs) that can enable UAVs to perform vehicle detection under a resource constrained environment such as in a UAV. The paper presents a holistic approach for designing such systems; the data collection and training stages, the CNN architecture, and the optimizations necessary to efficiently map such a CNN on a lightweight embedded processing platform suitable for deployment on UAVs. Through the analysis we propose a CNN architecture that is capable of detecting vehicles from aerial UAV images and can operate between 5-18 frames-per-second for a variety of platforms with an overall accuracy of ~95%. Overall, the proposed architecture is suitable for UAV applications, utilizing low-power embedded processors that can be deployed on commercial UAVs.
* C. Kyrkou, G. Plastiras, T. Theocharides, S. I. Venieris and C. S. Bouganis, "DroNet: Efficient convolutional neural network detector for real-time UAV applications," 2018 Design, Automation & Test in Europe Conference & Exhibition (DATE), Dresden, 2018, pp. 967-972. Keywords: Convolutional neural networks, Machine learning, autonomous aerial vehicles, computer vision, embedded systems