 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of automated crater catalogs for Mars from Benedix et al. (2020) and Lee and Hogan (2021)
Aug 28, 2023Crater mapping using neural networks and other automated methods has increased recently with automated Crater Detection Algorithms (CDAs) applied to planetary bodies throughout the solar system. A recent publication by Benedix et al. (2020) showed high performance at small scales compared to similar automated CDAs but with a net positive diameter bias in many crater candidates. I compare the publicly available catalogs from Benedix et al. (2020) and Lee & Hogan (2021) and show that the reported performance is sensitive to the metrics used to test the catalogs. I show how the more permissive comparison methods indicate a higher CDA performance by allowing worse candidate craters to match ground-truth craters. I show that the Benedix et al. (2020) catalog has a substantial performance loss with increasing latitude and identify an image projection issue that might cause this loss. Finally, I suggest future applications of neural networks in generating large scientific datasets be validated using secondary networks with independent data sources or training methods.
Automated crater detection with human level performance
Oct 23, 2020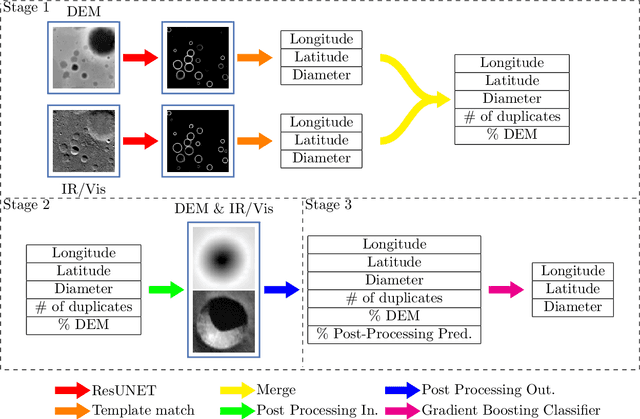
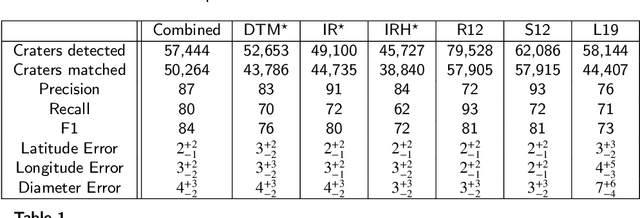


Crater cataloging is an important yet time-consuming part of geological mapping. We present an automated Crater Detection Algorithm (CDA) that is competitive with expert-human researchers and hundreds of times faster. The CDA uses multiple neural networks to process digital terrain model and thermal infra-red imagery to identify and locate craters across the surface of Mars. We use additional post-processing filters to refine and remove potential false crater detections, improving our precision and recall by 10% compared to Lee (2019). We now find 80% of known craters above 3km in diameter, and identify 7,000 potentially new craters (13% of the identified craters). The median differences between our catalog and other independent catalogs is 2-4% in location and diameter, in-line with other inter-catalog comparisons. The CDA has been used to process global terrain maps and infra-red imagery for Mars, and the software and generated global catalog are available at https://doi.org/10.5683/SP2/CFUNII.
Explorations in engagement for humans and robots
Jul 21, 2005



This paper explores the concept of engagement, the process by which individuals in an interaction start, maintain and end their perceived connection to one another. The paper reports on one aspect of engagement among human interactors--the effect of tracking faces during an interaction. It also describes the architecture of a robot that can participate in conversational, collaborative interactions with engagement gestures. Finally, the paper reports on findings of experiments with human participants who interacted with a robot when it either performed or did not perform engagement gestures. Results of the human-robot studies indicate that people become engaged with robots: they direct their attention to the robot more often in interactions where engagement gestures are present, and they find interactions more appropriate when engagement gestures are present than when they are not.
* 31 pages, 5 figures, 3 tables