 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVerification of Neural Network Control Systems using Symbolic Zonotopes and Polynotopes
Jun 26, 2023Verification and safety assessment of neural network controlled systems (NNCSs) is an emerging challenge. To provide guarantees, verification tools must efficiently capture the interplay between the neural network and the physical system within the control loop. In this paper, a compositional approach focused on inclusion preserving long term symbolic dependency modeling is proposed for the analysis of NNCSs. First of all, the matrix structure of symbolic zonotopes is exploited to efficiently abstract the input/output mapping of the loop elements through (inclusion preserving) affine symbolic expressions, thus maintaining linear dependencies between interacting blocks. Then, two further extensions are studied. Firstly, symbolic polynotopes are used to abstract the loop elements behaviour by means of polynomial symbolic expressions and dependencies. Secondly, an original input partitioning algorithm takes advantage of symbol preservation to assess the sensitivity of the computed approximation to some input directions. The approach is evaluated via different numerical examples and benchmarks. A good trade-off between low conservatism and computational efficiency is obtained.
Functional sets with typed symbols: Framework and mixed Polynotopes for hybrid nonlinear reachability and filtering
Sep 15, 2020
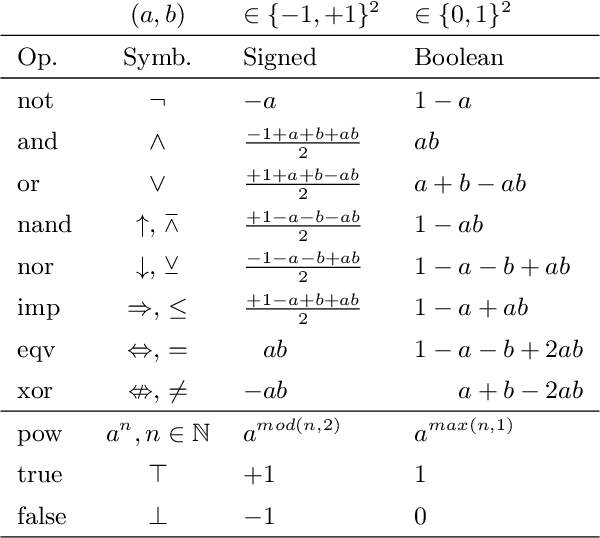
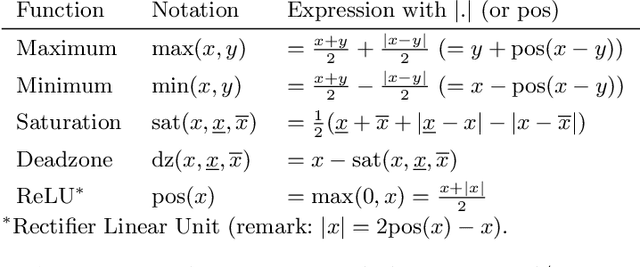
Verification and synthesis of Cyber-Physical Systems (CPS) are challenging and still raise numerous issues so far. In this paper, an original framework with mixed sets defined as function images of symbol type domains is first proposed. Syntax and semantics are explicitly distinguished. Then, both continuous (interval) and discrete (signed, boolean) symbol types are used to model dependencies through linear and polynomial functions, so leading to mixed zonotopic and polynotopic sets. Polynotopes extend sparse polynomial zonotopes with typed symbols. Polynotopes can both propagate a mixed encoding of intervals and describe the behavior of logic gates. A functional completeness result is given, as well as an inclusion method for elementary nonlinear and switching functions. A Polynotopic Kalman Filter (PKF) is then proposed as a hybrid nonlinear extension of Zonotopic Kalman Filters (ZKF). Bridges with a stochastic uncertainty paradigm are outlined. Finally, several discrete, continuous and hybrid numerical examples including comparisons illustrate the effectiveness of the theoretical results.