 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGSeg3D: A High-Precision Grid-Based Algorithm for Safety-Critical Ground Segmentation in LiDAR Point Clouds
Mar 04, 2026Ground segmentation in point cloud data is the process of separating ground points from non-ground points. This task is fundamental for perception in autonomous driving and robotics, where safety and reliable operation depend on the precise detection of obstacles and navigable surfaces. Existing methods often fall short of the high precision required in safety-critical environments, leading to false detections that can compromise decision-making. In this work, we present a ground segmentation approach designed to deliver consistently high precision, supporting the stringent requirements of autonomous vehicles and robotic systems operating in real-world, safety-critical scenarios.
Integrating Generic Sensor Fusion Algorithms with Sound State Representations through Encapsulation of Manifolds
Jul 06, 2011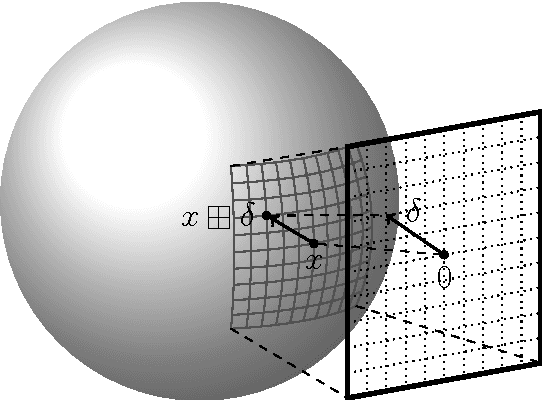
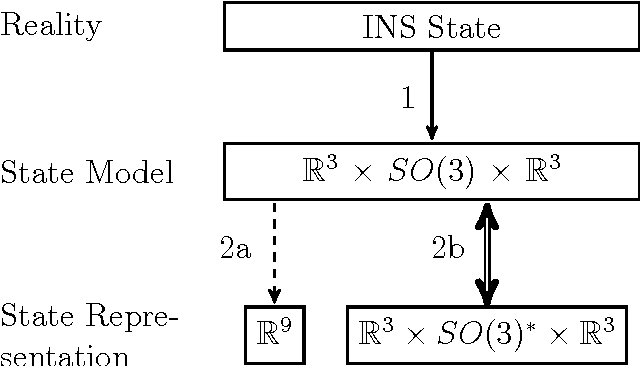
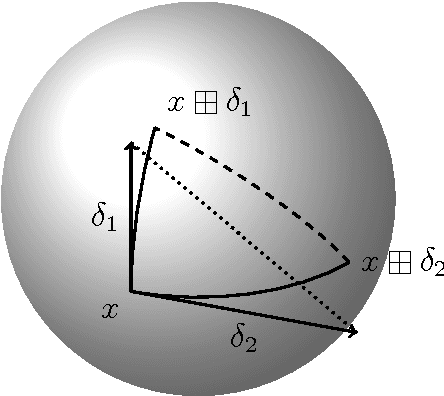
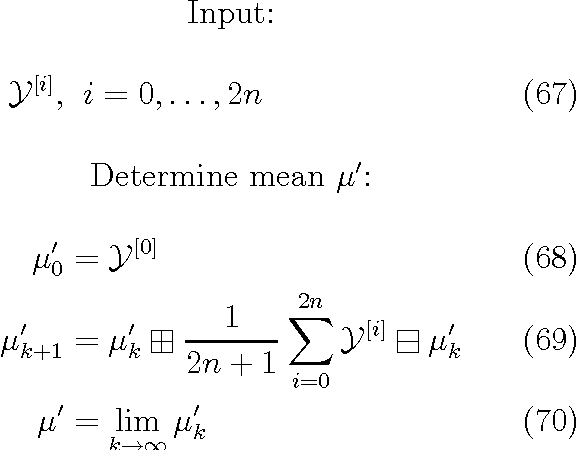
Common estimation algorithms, such as least squares estimation or the Kalman filter, operate on a state in a state space S that is represented as a real-valued vector. However, for many quantities, most notably orientations in 3D, S is not a vector space, but a so-called manifold, i.e. it behaves like a vector space locally but has a more complex global topological structure. For integrating these quantities, several ad-hoc approaches have been proposed. Here, we present a principled solution to this problem where the structure of the manifold S is encapsulated by two operators, state displacement [+]:S x R^n --> S and its inverse [-]: S x S --> R^n. These operators provide a local vector-space view \delta; --> x [+] \delta; around a given state x. Generic estimation algorithms can then work on the manifold S mainly by replacing +/- with [+]/[-] where appropriate. We analyze these operators axiomatically, and demonstrate their use in least-squares estimation and the Unscented Kalman Filter. Moreover, we exploit the idea of encapsulation from a software engineering perspective in the Manifold Toolkit, where the [+]/[-] operators mediate between a "flat-vector" view for the generic algorithm and a "named-members" view for the problem specific functions.