 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Modular Energy Aware Framework for Multicopter Modeling in Control and Planning Applications
Apr 04, 2025Unmanned aerial vehicles (UAVs), especially multicopters, have recently gained popularity for use in surveillance, monitoring, inspection, and search and rescue missions. Their maneuverability and ability to operate in confined spaces make them particularly useful in cluttered environments. For advanced control and mission planning applications, accurate and resource-efficient modeling of UAVs and their capabilities is essential. This study presents a modular approach to multicopter modeling that considers vehicle dynamics, energy consumption, and sensor integration. The power train model includes detailed descriptions of key components such as the lithium-ion battery, electronic speed controllers, and brushless DC motors. Their models are validated with real test flight data. In addition, sensor models, including LiDAR and cameras, are integrated to describe the equipment often used in surveillance and monitoring missions. The individual models are combined into an energy-aware multicopter model, which provide the basis for a companion study on path planning for unmanned aircaft system (UAS) swarms performing search and rescue missions in cluttered and dynamic environments. The flexible modeling approach enables easy description of different UAVs in a heterogeneous UAS swarm, allowing for energy-efficient operations and autonomous decision making for a reliable mission performance.
Energy Aware and Safe Path Planning for Unmanned Aircraft Systems
Apr 04, 2025



This paper proposes a path planning algorithm for multi-agent unmanned aircraft systems (UASs) to autonomously cover a search area, while considering obstacle avoidance, as well as the capabilities and energy consumption of the employed unmanned aerial vehicles. The path planning is optimized in terms of energy efficiency to prefer low energy-consuming maneuvers. In scenarios where a UAS is low on energy, it autonomously returns to its initial position for a safe landing, thus preventing potential battery damage. To accomplish this, an energy-aware multicopter model is integrated into a path planning algorithm based on model predictive control and mixed integer linear programming. Besides factoring in energy consumption, the planning is improved by dynamically defining feasible regions for each UAS to prevent obstacle corner-cutting or over-jumping.
Safe Hierarchical Model Predictive Control and Planning for Autonomous Systems
Mar 27, 2022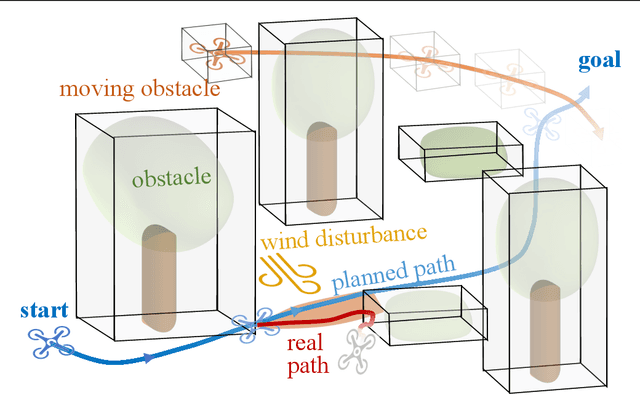
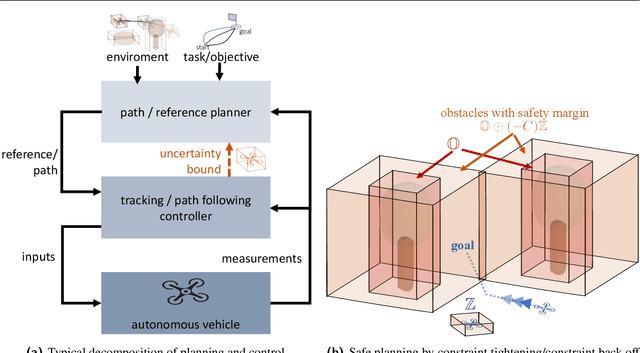
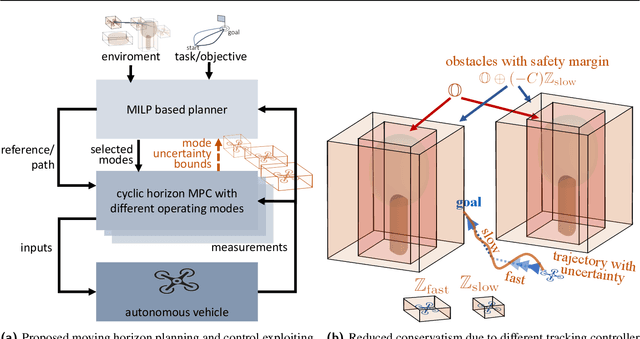
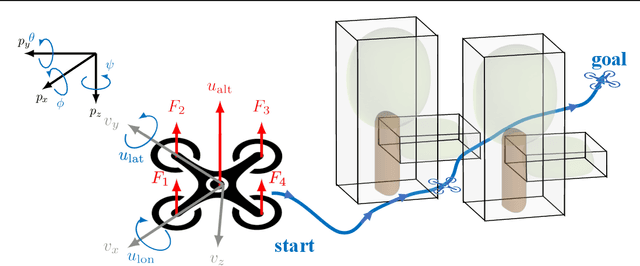
Planning and control for autonomous vehicles usually are hierarchical separated. However, increasing performance demands and operating in highly dynamic environments requires an frequent re-evaluation of the planning and tight integration of control and planning to guarantee safety. We propose an integrated hierarchical predictive control and planning approach to tackle this challenge. Planner and controller are based on the repeated solution of moving horizon optimal control problems. The planner can choose different low-layer controller modes for increased flexibility and performance instead of using a single controller with a large safety margin for collision avoidance under uncertainty. Planning is based on simplified system dynamics and safety, yet flexible operation is ensured by constraint tightening based on a mixed-integer linear programming formulation. A cyclic horizon tube-based model predictive controller guarantees constraint satisfaction for different control modes and disturbances. Examples of such modes are a slow-speed movement with high precision and fast-speed movements with large uncertainty bounds. Allowing for different control modes reduces the conservatism, while the hierarchical decomposition of the problem reduces the computational cost and enables real-time implementation. We derive conditions for recursive feasibility to ensure constraint satisfaction and obstacle avoidance to guarantee safety and ensure compatibility between the layers and modes. Simulation results illustrate the efficiency and applicability of the proposed hierarchical strategy.