 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Physical Properties of Unseen Deformable Objects by Leveraging Large Language Models and Robot Actions
Jun 04, 2025In this paper, we consider the problem of understanding the physical properties of unseen objects through interactions between the objects and a robot. Handling unseen objects with special properties such as deformability is challenging for traditional task and motion planning approaches as they are often with the closed world assumption. Recent results in Large Language Models (LLMs) based task planning have shown the ability to reason about unseen objects. However, most studies assume rigid objects, overlooking their physical properties. We propose an LLM-based method for probing the physical properties of unseen deformable objects for the purpose of task planning. For a given set of object properties (e.g., foldability, bendability), our method uses robot actions to determine the properties by interacting with the objects. Based on the properties examined by the LLM and robot actions, the LLM generates a task plan for a specific domain such as object packing. In the experiment, we show that the proposed method can identify properties of deformable objects, which are further used for a bin-packing task where the properties take crucial roles to succeed.
Defect Detection in Photolithographic Patterns Using Deep Learning Models Trained on Synthetic Data
May 15, 2025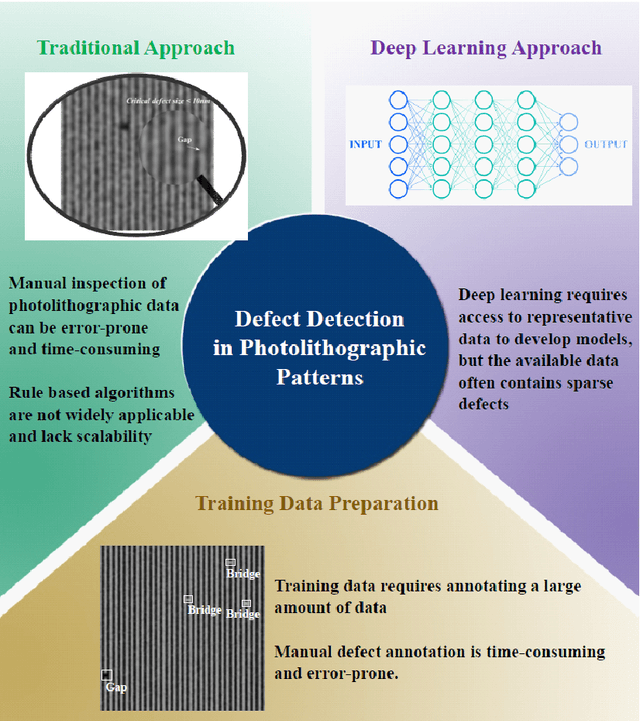



In the photolithographic process vital to semiconductor manufacturing, various types of defects appear during EUV pattering. Due to ever-shrinking pattern size, these defects are extremely small and cause false or missed detection during inspection. Specifically, the lack of defect-annotated quality data with good representation of smaller defects has prohibited deployment of deep learning based defect detection models in fabrication lines. To resolve the problem of data unavailability, we artificially generate scanning electron microscopy (SEM) images of line patterns with known distribution of defects and autonomously annotate them. We then employ state-of-the-art object detection models to investigate defect detection performance as a function of defect size, much smaller than the pitch width. We find that the real-time object detector YOLOv8 has the best mean average precision of 96% as compared to EfficientNet, 83%, and SSD, 77%, with the ability to detect smaller defects. We report the smallest defect size that can be detected reliably. When tested on real SEM data, the YOLOv8 model correctly detected 84.6% of Bridge defects and 78.3% of Break defects across all relevant instances. These promising results suggest that synthetic data can be used as an alternative to real-world data in order to develop robust machine-learning models.