 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContextual Linear Activation Steering of Language Models
Apr 27, 2026Linear activation steering is a powerful approach for eliciting the capabilities of large language models and specializing their behavior using limited labeled data. While effective, existing methods often apply a fixed steering strength to all tokens, resulting in inconsistent steering quality across diverse input prompts. In this work, we introduce Contextual Linear Activation Steering (CLAS), a method that dynamically adapts linear activation steering to context-dependent steering strengths. Across eleven steering benchmarks and four model families, it consistently outperforms standard linear activation steering and matches or exceeds the performance of ReFT and LoRA in settings with limited labeled data. We therefore propose CLAS as a scalable, interpretable, and accurate method for specializing and steering large language models.
Spatio-Temporal Scene-Graph Embedding for Autonomous Vehicle Collision Prediction
Nov 11, 2021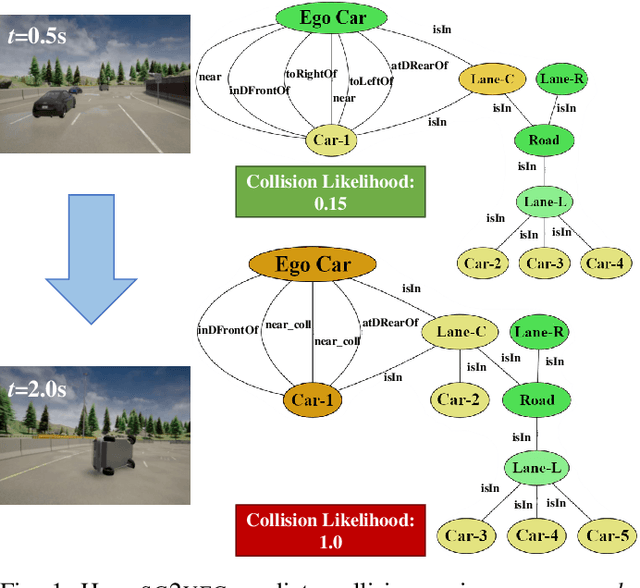
In autonomous vehicles (AVs), early warning systems rely on collision prediction to ensure occupant safety. However, state-of-the-art methods using deep convolutional networks either fail at modeling collisions or are too expensive/slow, making them less suitable for deployment on AV edge hardware. To address these limitations, we propose sg2vec, a spatio-temporal scene-graph embedding methodology that uses Graph Neural Network (GNN) and Long Short-Term Memory (LSTM) layers to predict future collisions via visual scene perception. We demonstrate that sg2vec predicts collisions 8.11% more accurately and 39.07% earlier than the state-of-the-art method on synthesized datasets, and 29.47% more accurately on a challenging real-world collision dataset. We also show that sg2vec is better than the state-of-the-art at transferring knowledge from synthetic datasets to real-world driving datasets. Finally, we demonstrate that sg2vec performs inference 9.3x faster with an 88.0% smaller model, 32.4% less power, and 92.8% less energy than the state-of-the-art method on the industry-standard Nvidia DRIVE PX 2 platform, making it more suitable for implementation on the edge.
roadscene2vec: A Tool for Extracting and Embedding Road Scene-Graphs
Sep 02, 2021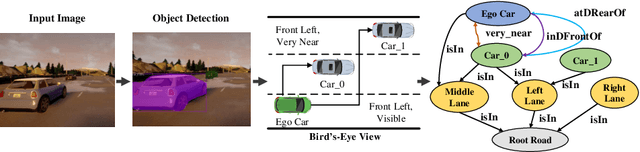
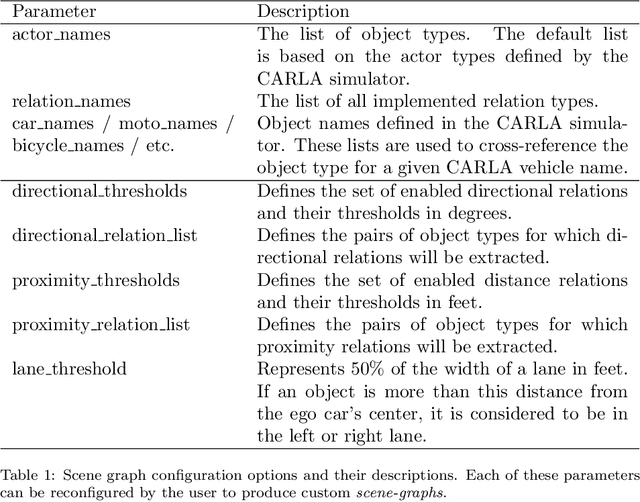
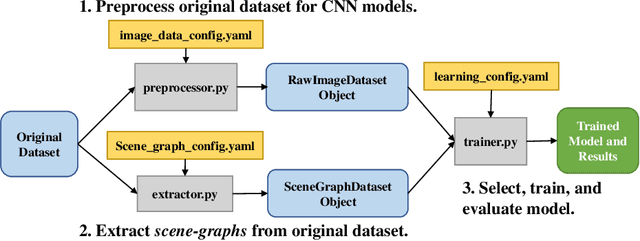
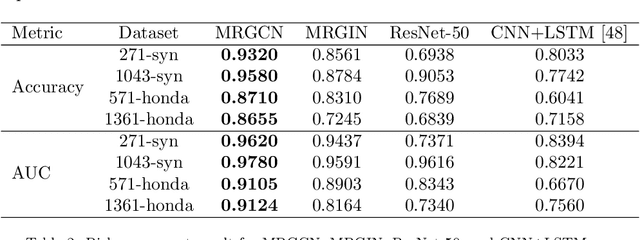
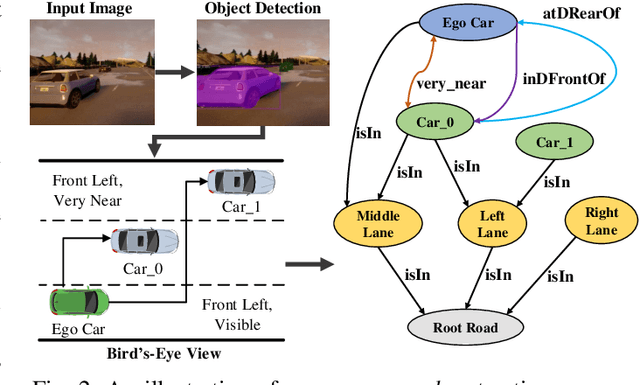
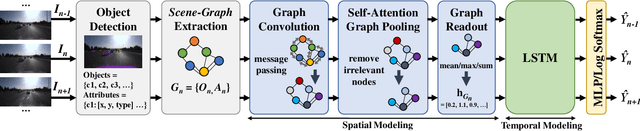
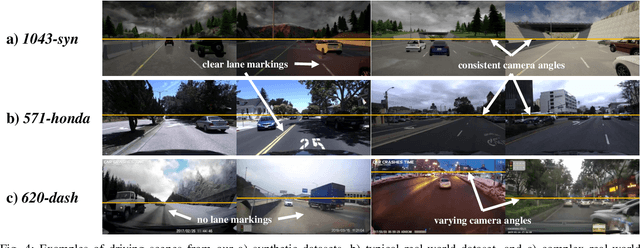
Recently, road scene-graph representations used in conjunction with graph learning techniques have been shown to outperform state-of-the-art deep learning techniques in tasks including action classification, risk assessment, and collision prediction. To enable the exploration of applications of road scene-graph representations, we introduce roadscene2vec: an open-source tool for extracting and embedding road scene-graphs. The goal of roadscene2vec is to enable research into the applications and capabilities of road scene-graphs by providing tools for generating scene-graphs, graph learning models to generate spatio-temporal scene-graph embeddings, and tools for visualizing and analyzing scene-graph-based methodologies. The capabilities of roadscene2vec include (i) customized scene-graph generation from either video clips or data from the CARLA simulator, (ii) multiple configurable spatio-temporal graph embedding models and baseline CNN-based models, (iii) built-in functionality for using graph and sequence embeddings for risk assessment and collision prediction applications, (iv) tools for evaluating transfer learning, and (v) utilities for visualizing scene-graphs and analyzing the explainability of graph learning models. We demonstrate the utility of roadscene2vec for these use cases with experimental results and qualitative evaluations for both graph learning models and CNN-based models. roadscene2vec is available at https://github.com/AICPS/roadscene2vec.