 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Image Processing Applied To Object Segmentation By Intensity And Motion
Aug 26, 2022The current technological development allows us to carry out tasks that some time ago were unthinkable if not impossible, digital image processing has been one of the major constants of development today, taking into account that its implementation dates from a short time ago, OpenCV [1] is a tool focused on machine vision, In this case implemented in an object-oriented programming platform based on Java language offered by the NetBeans development software, based on the above, a physical platform was proposed and implemented as a closed environment which through the development of an algorithm allowed detection and segmentation of objects by means of the RGB color model; In future works this algorithm will provide the information base for the autonomous robotic platform; this advance opens a wide spectrum for the development of applications and tools in the field of artificial vision.
Algorithm Development for Controlling Movement of a Robotic Platform by Digital Image Processing
May 23, 2022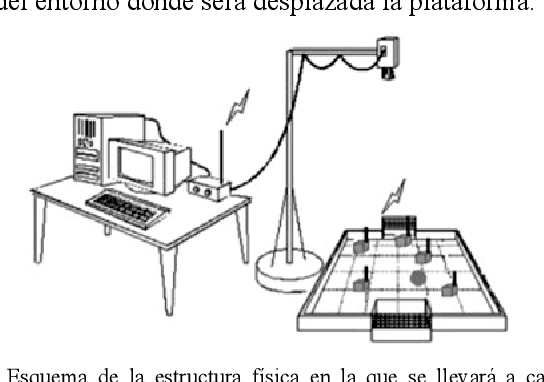
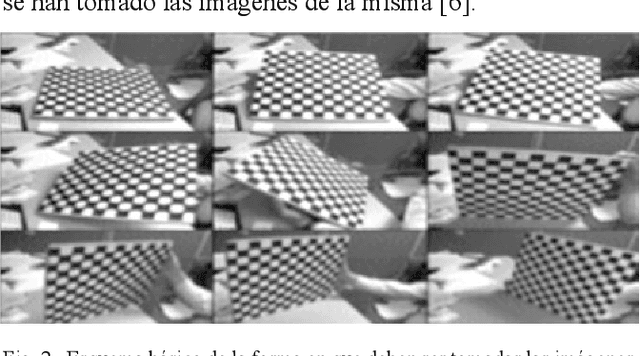
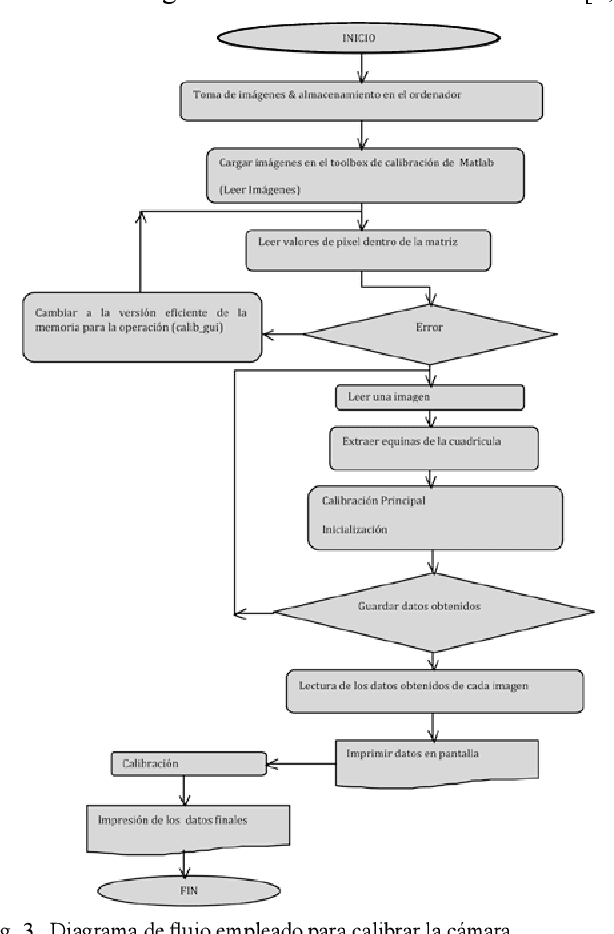
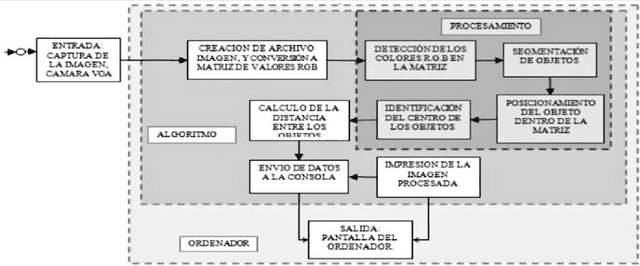
The following work shows an algorithm that can process images digitally with the goal of control the movement of a mobile robotic platform in a certain environment. The platform is identified with a specific color, and displacement environment of the platform shift has identified obstacles with different colors, for both cases it worked with the RGB color scale. To obtain the control's movement of the robotic platform, the algorithm was developed in C programming language, and used the Open CV libraries for processing images captured by a video camera on the Dev-platform C + +. The video camera was previously calibrated using ZHANG technique where parameters were obtained focal length and tilt focal pixel. In the algorithm histogram analysis and segmentation of the image were developed, allowing to determine exactly the relative position of the platform with respect to the obstacles and movement strategy to follow.
* 6 figures,5 pages, in Spanish language