 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolarCrossFormer: Improving day-ahead Solar Irradiance Forecasting by Integrating Satellite Imagery and Ground Sensors
Sep 19, 2025Accurate day-ahead forecasts of solar irradiance are required for the large-scale integration of solar photovoltaic (PV) systems into the power grid. However, current forecasting solutions lack the temporal and spatial resolution required by system operators. In this paper, we introduce SolarCrossFormer, a novel deep learning model for day-ahead irradiance forecasting, that combines satellite images and time series from a ground-based network of meteorological stations. SolarCrossFormer uses novel graph neural networks to exploit the inter- and intra-modal correlations of the input data and improve the accuracy and resolution of the forecasts. It generates probabilistic forecasts for any location in Switzerland with a 15-minute resolution for horizons up to 24 hours ahead. One of the key advantages of SolarCrossFormer its robustness in real life operations. It can incorporate new time-series data without retraining the model and, additionally, it can produce forecasts for locations without input data by using only their coordinates. Experimental results over a dataset of one year and 127 locations across Switzerland show that SolarCrossFormer yield a normalized mean absolute error of 6.1 % over the forecasting horizon. The results are competitive with those achieved by a commercial numerical weather prediction service.
Spatio-temporal graph neural networks for multi-site PV power forecasting
Jul 29, 2021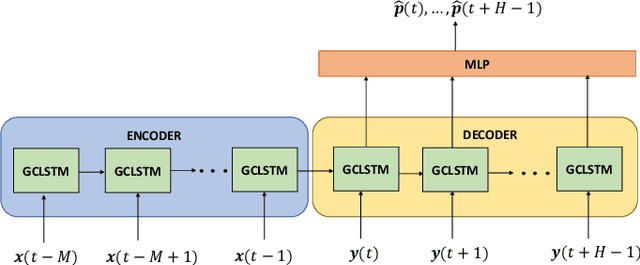
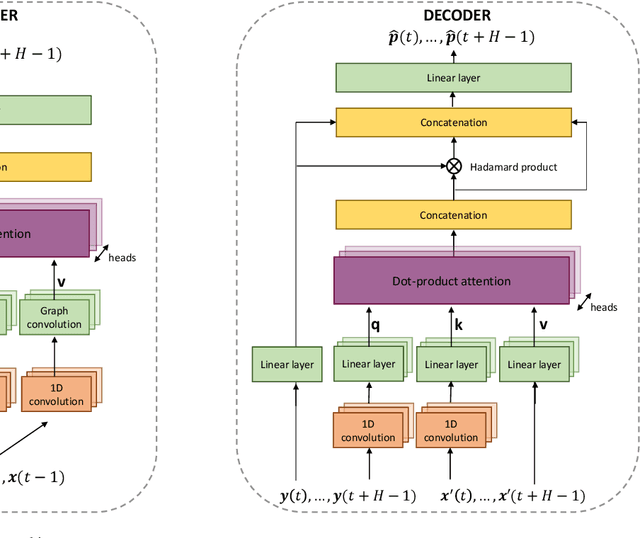
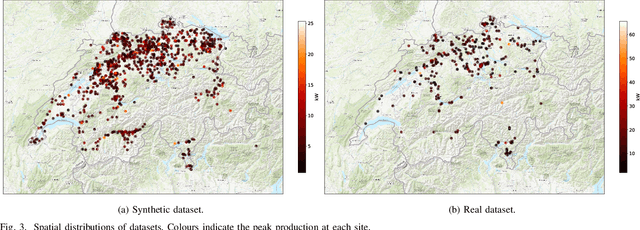
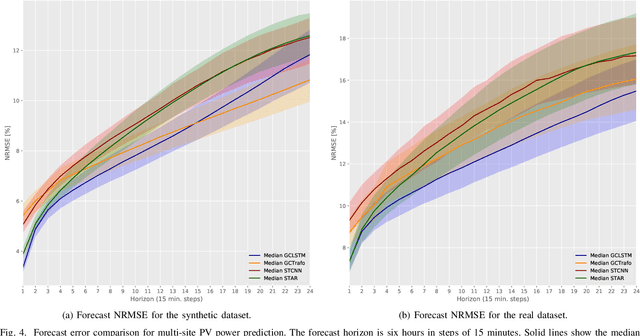
Accurate forecasting of solar power generation with fine temporal and spatial resolution is vital for the operation of the power grid. However, state-of-the-art approaches that combine machine learning with numerical weather predictions (NWP) have coarse resolution. In this paper, we take a graph signal processing perspective and model multi-site photovoltaic (PV) production time series as signals on a graph to capture their spatio-temporal dependencies and achieve higher spatial and temporal resolution forecasts. We present two novel graph neural network models for deterministic multi-site PV forecasting dubbed the graph-convolutional long short term memory (GCLSTM) and the graph-convolutional transformer (GCTrafo) models. These methods rely solely on production data and exploit the intuition that PV systems provide a dense network of virtual weather stations. The proposed methods were evaluated in two data sets for an entire year: 1) production data from 304 real PV systems, and 2) simulated production of 1000 PV systems, both distributed over Switzerland. The proposed models outperform state-of-the-art multi-site forecasting methods for prediction horizons of six hours ahead. Furthermore, the proposed models outperform state-of-the-art single-site methods with NWP as inputs on horizons up to four hours ahead.
State space models for building control: how deep should you go?
Oct 23, 2020Power consumption in buildings show non-linear behaviors that linear models cannot capture whereas recurrent neural networks (RNNs) can. This ability makes RNNs attractive alternatives for the model-predictive control (MPC) of buildings. However RNN models lack mathematical regularity which makes their use challenging in optimization problems. This work therefore systematically investigates whether using RNNs for building control provides net gains in an MPC framework. It compares the representation power and control performance of two architectures: a fully non-linear RNN architecture and a linear state-space model with non-linear regressor. The comparison covers five instances of each architecture over two months of simulated operation in identical conditions. The error on the one-hour forecast of temperature is 69% lower with the RNN model than with the linear one. In control the linear state-space model outperforms by 10% on the objective function, shows 2.8 times higher average temperature violations, and needs a third of the computation time the RNN model requires. This work therefore demonstrates that in their current form RNNs do improve accuracy but on balance well-designed linear state-space models with non-linear regressors are best in most cases of MPC.