 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-Control of Mobile Robots Under Time-Delay Using Barrier Certificates and a Two-Layer Predictor
Apr 30, 2021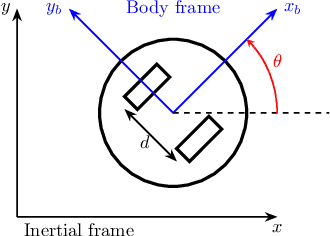
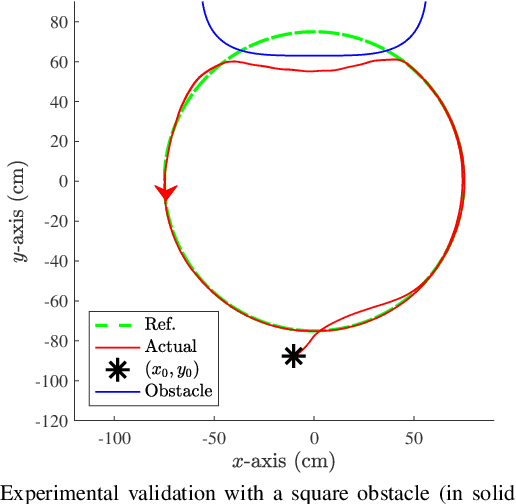
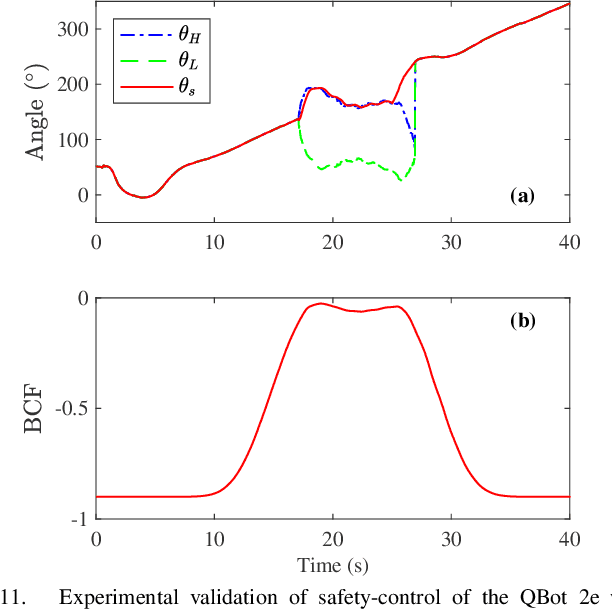
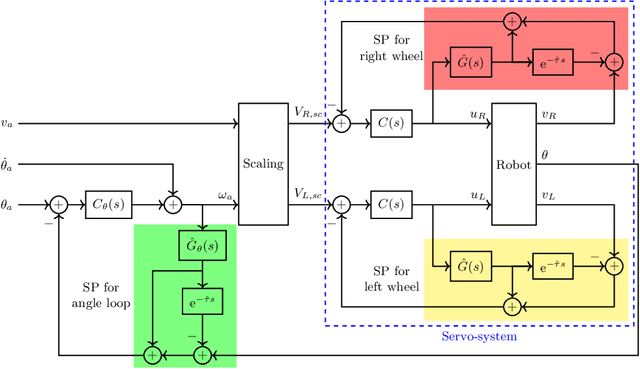
Performing swift and agile maneuvers is essential for the safe operation of autonomous mobile robots. Moreover, the presence of time-delay restricts the response time of the system and hinders the safety performance. Thus, this paper proposes a modular and scalable safety-control design that utilizes the Smith predictor and barrier certificates to safely and consistently avoid obstacles with different footprints. The proposed solution includes a two-layer predictor to compensate for the time-delay in the servo-system and angle control loops. The proposed predictor configuration dramatically improves the transient performance and reduces response time. Barrier certificates are used to determine the safe range of the robot's heading angle to avoid collisions. The proposed obstacle avoidance technique conveniently integrates with various trajectory tracking algorithms, which enhances design flexibility. The angle condition is adaptively calculated and corrects the robot's heading angle and angular velocity. Also, the proposed method accommodates multiple obstacles and decouples the control structure from the obstacles' shape, count, and distribution. The control structure has only eight tunable parameters facilitating control calibration and tuning in large systems of mobile robots. Extensive experimental results verify the effectiveness of the proposed safety-control.
Safety-Augmented Operation of Mobile Robots Using Variable Structure Control
Apr 28, 2021
The design process and complexity of existing safety controls are heavily determined by the geometrical properties of the environment, which affects the proof of convergence, design scalability, performance robustness, and numerical efficiency of the control. Hence, this paper proposes a variable structure control to isolate the environment's geometrical complexity from the control structure. A super-twisting algorithm is used to achieve accurate trajectory tracking and robust safety control. The safety control is designed solely based on distance measurement. First, a nominal safety model for obstacle avoidance is derived, where realistic system constraints are considered. The nominal model is well-suited for safety control design for obstacle avoidance, geofencing, and border patrol with analytically proven stability results. The safety control utilizes distance measurement to maintain a safe distance by compensating the robot's angular velocity. A supervisory logic is constructed to guarantee the overall stability and safety of the system. Operational safety and precision tracking are proven under parametric uncertainty and environmental uncertainty. The proposed design is modular with minimal tuning parameters, which reduces the computational burden and improves the control scalability. The effectiveness of the proposed method is verified against various case studies.