 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoad Modulation for Backscatter Communication: Channel Capacity and Capacity-Approaching Finite Constellations
Jul 17, 2022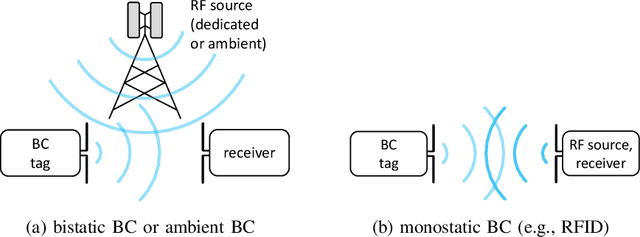
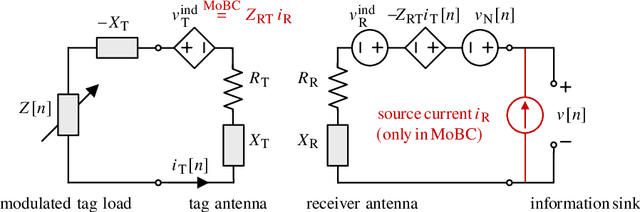
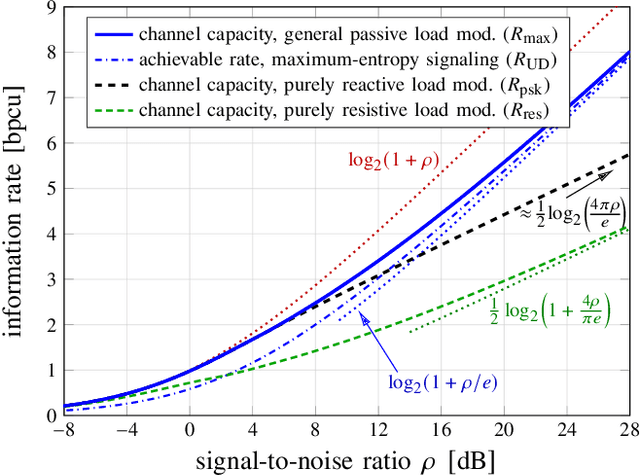
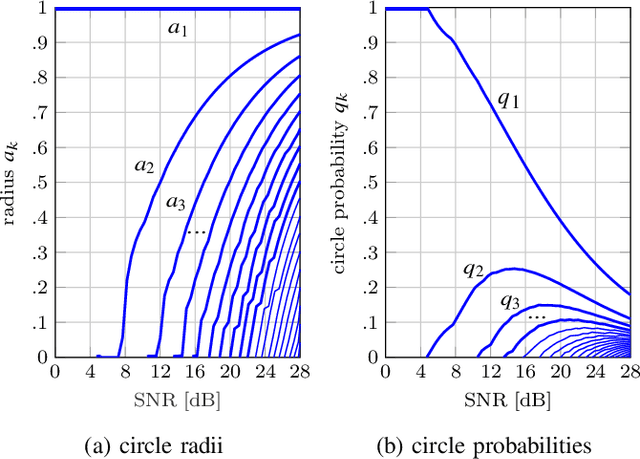
In backscatter communication (BC), a passive tag transmits information by just affecting an external electromagnetic field through load modulation. Thereby, the feed current of the excited tag antenna is modulated by adapting the passive termination load. This paper studies the achievable information rates with a freely adaptable passive load. As a prerequisite, we unify monostatic, bistatic, and ambient BC with circuit-based system modeling. A crucial insight is that channel capacity is described by existing results on peak-power-limited quadrature Gaussian channels, because the steady-state tag current phasor lies on a disk. Consequently, we derive the channel capacity in the case of an unmodulated external field, for a general passive or purely reactive or resistive tag load. We find that modulating both resistance and reactance is crucial for high rates. We discuss the capacity-achieving load statistics, the rate asymptotics, and the capacity of ambient BC in important special cases. Furthermore, we propose a capacity-approaching finite constellation design: a tailored amplitude-and-phase-shift keying on the reflection coefficient. We also demonstrate high rates for very simple loads of just a few switched resistors and capacitors. Finally, we investigate the rate loss from a value-range-constrained load, which is found to be small for moderate constraints.
Pairwise Distance and Position Estimators From Differences in UWB Channels to Observers
Sep 23, 2021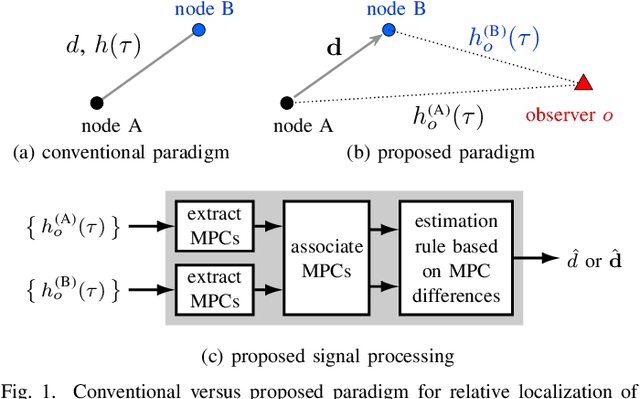
We consider the problem of obtaining relative location information between two wireless nodes from the differences in their ultra-wideband (UWB) channels to observer nodes. Our approach focuses on the delays of multipath components (MPCs) extracted from the observed channels. For the two different cases of known and unknown MPC association between these channels, we present estimators for the distance and for the relative position vector between the two nodes. The position estimators require both MPC directions and MPC delays as input. All presented estimators exhibit very desirable technological properties: they do not require line-of-sight conditions, precise synchronization, or knowledge about the observer locations or about the environment. These advantages could enable low-cost wireless network localization in dynamic multipath environments. The exposition is complemented by a numerical evaluation of the estimation accuracy using random sampling, where especially the position estimators show the potential for great accuracy.
Pairwise Node Localization From Differences in Their UWB Channels to Observer Nodes
Sep 09, 2021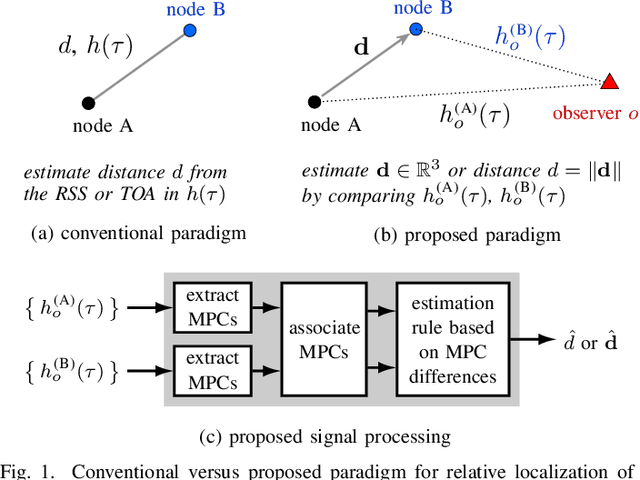

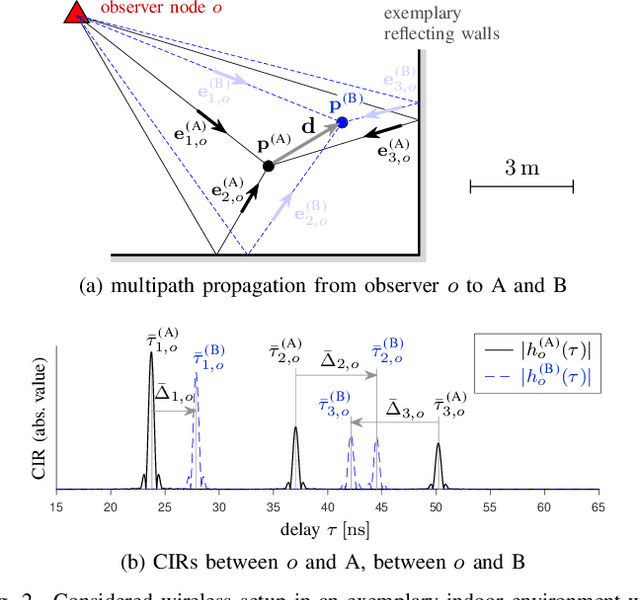
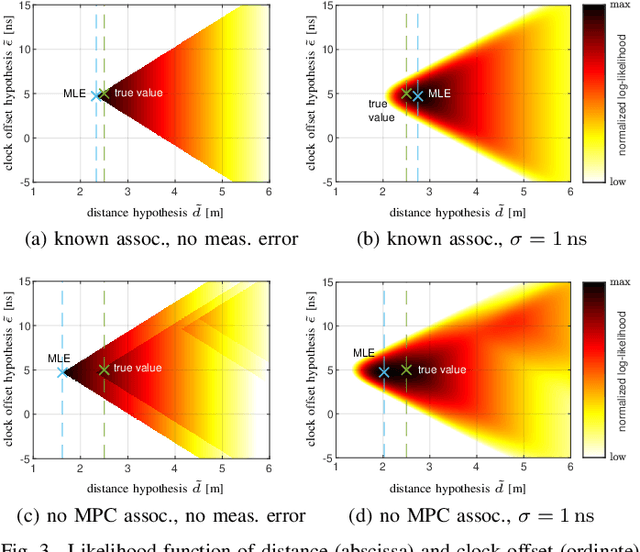
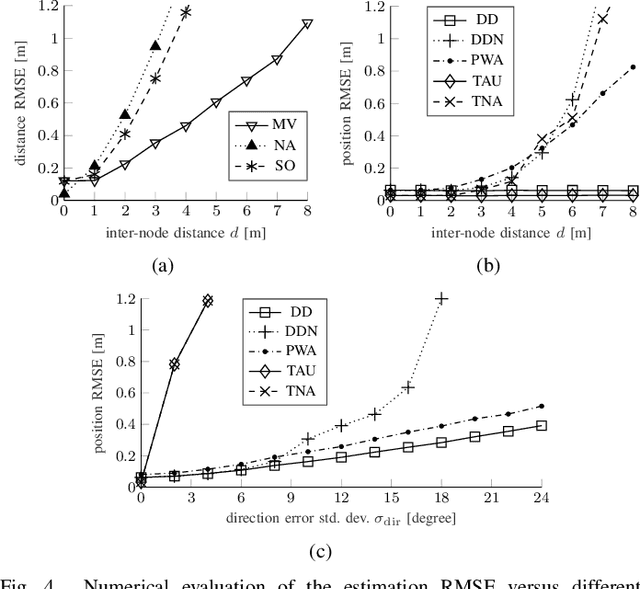
We consider the problem of localization and distance estimation between a pair of wireless nodes in a multipath propagation environment, but not the usual way of processing a channel measurement between them. We propose a novel paradigm which compares the two nodes' ultra-wideband (UWB) channels to other nodes, called observers. The key principle is that the channel impulse responses (CIRs) are similar at small inter-node distance $d$ and differ increasingly with increasing $d$. We present distance estimators which utilize the rich location information contained in the delay differences of extracted multipath components (MPCs). Likewise, we present estimators for the relative position vector which process both MPC delays and MPC directions. We do so for various important cases: with and without clock synchronization, delay measurement errors, and knowledge of the MPC association between the two CIRs. The estimators exhibit great technological advantages: they do not require precise time-synchronization, line-of-sight conditions, or knowledge about the observer locations or the environment. We study the estimation accuracy with a numerical evaluation based on random sampling and, additionally, with an experimental evaluation based on measurements in an indoor environment. The proposal shows the potential for great accuracy in theory and practice. Integrating the paradigm into existing localization algorithms and systems could enable low-cost localization of wireless users or networks in dynamic multipath settings.
Cooperative Magneto-Inductive Localization
Jun 19, 2021
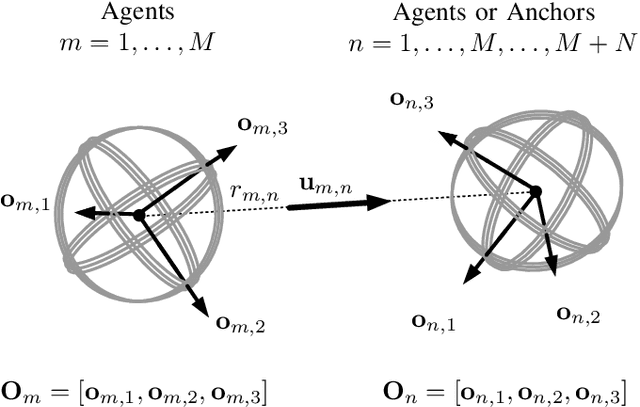
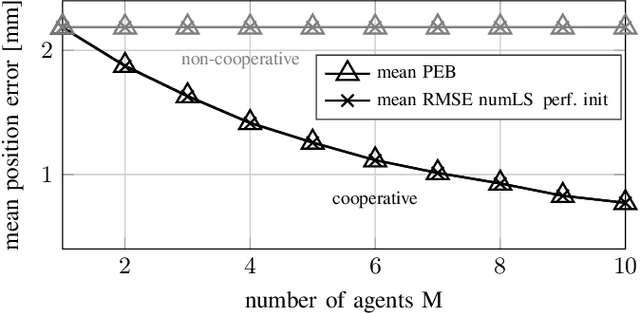
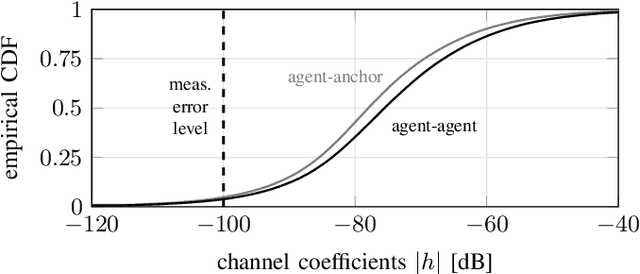
Wireless localization is a key requirement for many applications. It concerns position estimation of mobile nodes (agents) relative to fixed nodes (anchors) from wireless channel measurements. Cooperative localization is an advanced concept that considers the joint estimation of multiple agent positions based on channel measurements of all agent-anchor links together with all agent-agent links. In this paper we present the first study of cooperative localization for magneto-inductive wireless sensor networks, which are of technological interest due to good material penetration and channel predictability. We demonstrate significant accuracy improvements (a factor of 3 for 10 cooperating agents) over the non-cooperative scheme. The evaluation uses the Cram\'er-Rao lower bound on the cooperative position estimation error, which is derived herein. To realize this accuracy, the maximum-likelihood estimate (MLE) must be computed by solving a high-dimensional least-squares problem, whereby convergence to local minima proves to be problematic. A proposed cooperative localization algorithm addresses this issue: first, preliminary estimates of the agent positions and orientations are computed, which then serve as initial values for a gradient search. In all our test cases, this method yields the MLE and the associated high accuracy (comprising the cooperation gain) from a single solver run. The preliminary estimates use novel closed-form MLE formulas of the distance, direction and orientation for single links between three-axis coils, which are given in detail.