 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Debris Mass Estimation Model for Autonomous Underwater Vehicle
Sep 19, 2023



Marine debris poses a significant threat to the survival of marine wildlife, often leading to entanglement and starvation, ultimately resulting in death. Therefore, removing debris from the ocean is crucial to restore the natural balance and allow marine life to thrive. Instance segmentation is an advanced form of object detection that identifies objects and precisely locates and separates them, making it an essential tool for autonomous underwater vehicles (AUVs) to navigate and interact with their underwater environment effectively. AUVs use image segmentation to analyze images captured by their cameras to navigate underwater environments. In this paper, we use instance segmentation to calculate the area of individual objects within an image, we use YOLOV7 in Roboflow to generate a set of bounding boxes for each object in the image with a class label and a confidence score for every detection. A segmentation mask is then created for each object by applying a binary mask to the object's bounding box. The masks are generated by applying a binary threshold to the output of a convolutional neural network trained to segment objects from the background. Finally, refining the segmentation mask for each object is done by applying post-processing techniques such as morphological operations and contour detection, to improve the accuracy and quality of the mask. The process of estimating the area of instance segmentation involves calculating the area of each segmented instance separately and then summing up the areas of all instances to obtain the total area. The calculation is carried out using standard formulas based on the shape of the object, such as rectangles and circles. In cases where the object is complex, the Monte Carlo method is used to estimate the area. This method provides a higher degree of accuracy than traditional methods, especially when using a large number of samples.
Predictive Model for Gross Community Production Rate of Coral Reefs using Ensemble Learning Methodologies
Nov 07, 2021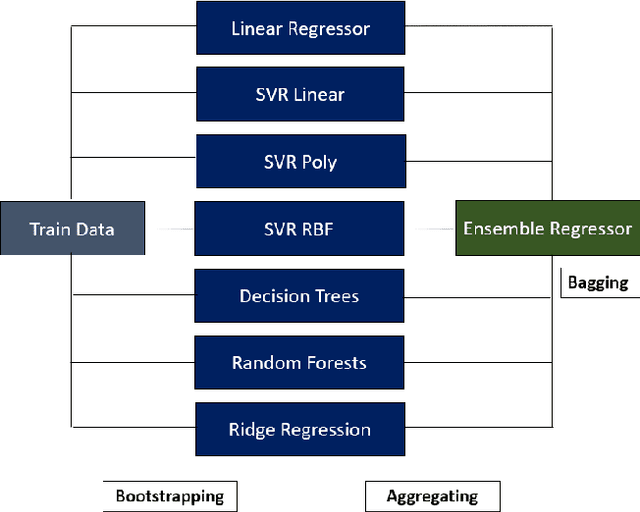
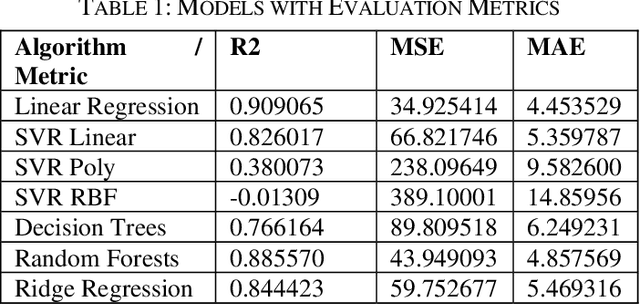
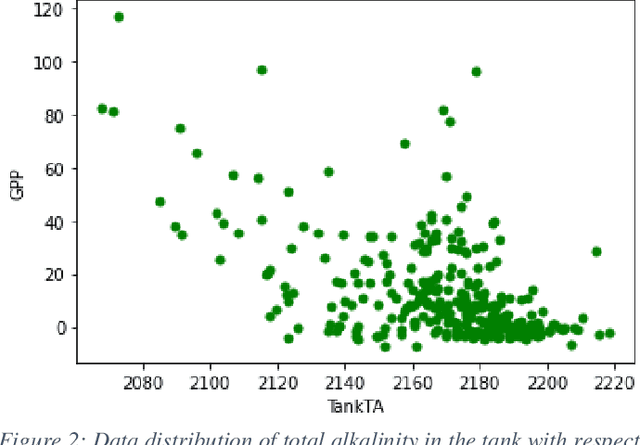
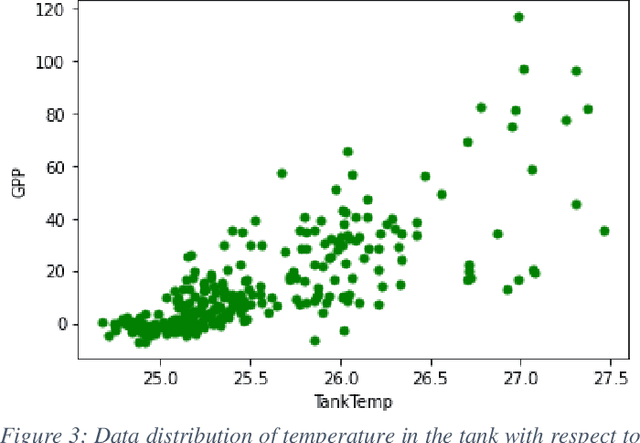
Coral reefs play a vital role in maintaining the ecological balance of the marine ecosystem. Various marine organisms depend on coral reefs for their existence and their natural processes. Coral reefs provide the necessary habitat for reproduction and growth for various exotic species of the marine ecosystem. In this article, we discuss the most important parameters which influence the lifecycle of coral and coral reefs such as ocean acidification, deoxygenation and other physical parameters such as flow rate and surface area. Ocean acidification depends on the amount of dissolved Carbon dioxide (CO2). This is due to the release of H+ ions upon the reaction of the dissolved CO2 gases with the calcium carbonate compounds in the ocean. Deoxygenation is another problem that leads to hypoxia which is characterized by a lesser amount of dissolved oxygen in water than the required amount for the existence of marine organisms. In this article, we highlight the importance of physical parameters such as flow rate which influence gas exchange, heat dissipation, bleaching sensitivity, nutrient supply, feeding, waste and sediment removal, growth and reproduction. In this paper, we also bring out these important parameters and propose an ensemble machine learning-based model for analyzing these parameters and provide better rates that can help us to understand and suitably improve the ocean composition which in turn can eminently improve the sustainability of the marine ecosystem, mainly the coral reefs
Grayscale Based Algorithm for Remote Sensing with Deep Learning
Oct 16, 2021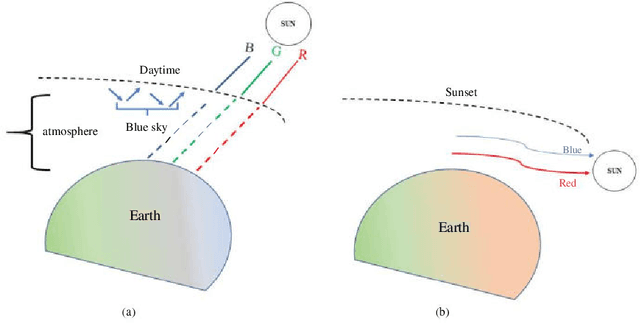
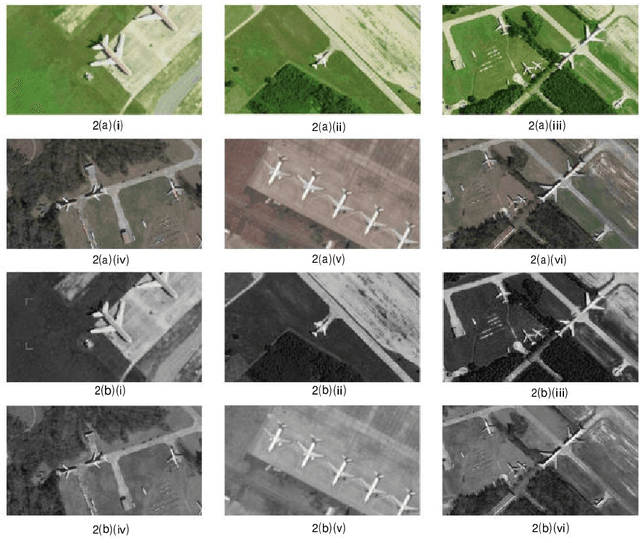
Remote sensing is the image acquisition of a target without having physical contact with it. Nowadays remote sensing data is widely preferred due to its reduced image acquisition period. The remote sensing of ground targets is more challenging because of the various factors that affect the propagation of light through different mediums from a satellite acquisition. Several Convolutional Neural Network-based algorithms are being implemented in the field of remote sensing. Supervised learning is a machine learning technique where the data is labelled according to their classes prior to the training. In order to detect and classify the targets more accurately, YOLOv3, an algorithm based on bounding and anchor boxes is adopted. In order to handle the various effects of light travelling through the atmosphere, Grayscale based YOLOv3 configuration is introduced. For better prediction and for solving the Rayleigh scattering effect, RGB based grayscale algorithms are proposed. The acquired images are analysed and trained with the grayscale based YOLO3 algorithm for target detection. The results show that the grayscale-based method can sense the target more accurately and effectively than the traditional YOLOv3 approach.
Artificial Neural Networks Based Analysis of BLDC Motor Speed Control
Aug 27, 2021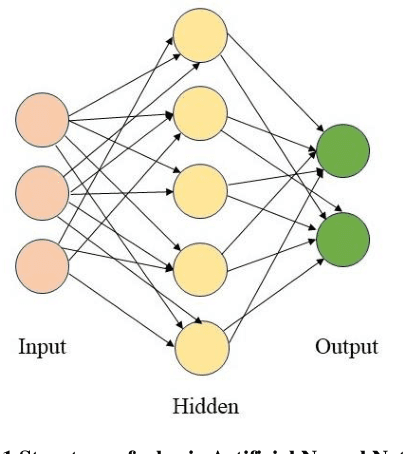
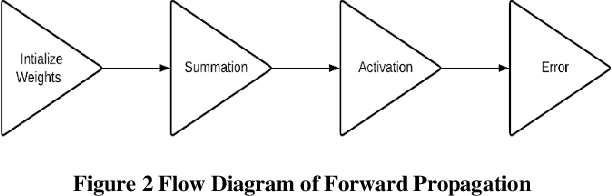
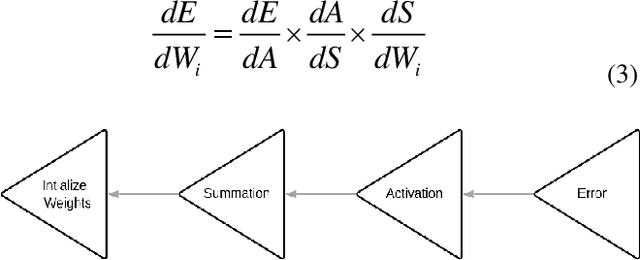
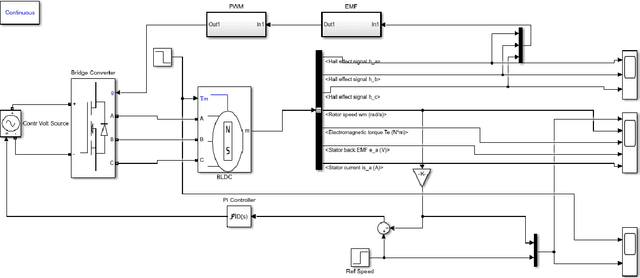
Artificial Neural Network (ANN) is a simple network that has an input, an output, and numerous hidden layers with a set of nodes. Implementation of ANN algorithms in electrical, and electronics engineering always satisfies with the expected results as ANN handles binary data more accurately. Brushless Direct Current motor (BLDC motor) uses electronic closed-loop controllers to switch DC current to the motor windings and produces the magnetic fields. The BLDC motor finds various applications owing to its high speed, low maintenance and adequate torque capability. They are highly preferred than the other motors because of their better performance and it is easy to control their speed by Power Converters. This article presents a method of speed control of BLDC motors where speed is controlled by changing the DC input voltage of the bridge converter that feeds the motor winding. The control is done by using a PI based speed controller. The motor is modeled in the MATLAB/Simulink and the speed control is obtained with a PI controller. EMF signals, rotor speed, electromagnetic torque, Hall Effect signals, PWM and EMF signals simulations are then obtained. This acquired data is then fed into binary artificial neural networks and as a result, the ANN model predicts the corresponding parameters close to the simulation results. Both the mathematical based simulation and data based prediction gives satisfactory results
AI Based Waste classifier with Thermo-Rapid Composting
Aug 03, 2021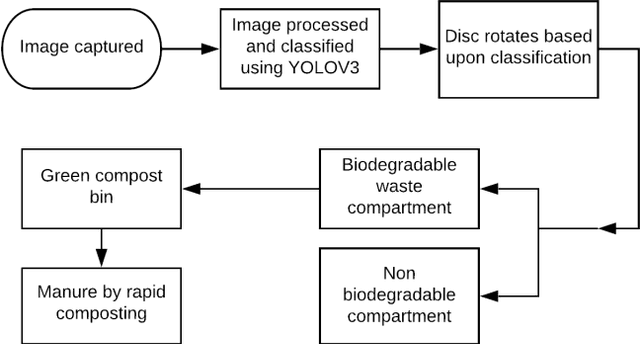
Waste management is a certainly a very complex and difficult process especially in very large cities. It needs immense man power and also uses up other resources such as electricity and fuel. This creates a need to use a novel method with help of latest technologies. Here in this article we present a new waste classification technique using Computer Vision (CV) and deep learning (DL). To further improve waste classification ability, support machine vectors (SVM) are used. We also decompose the degradable waste with help of rapid composting. In this article we have mainly worked on segregation of municipal solid waste (MSW). For this model, we use YOLOv3 (You Only Look Once) a computer vision-based algorithm popularly used to detect objects which is developed based on Convolution Neural Networks (CNNs) which is a machine learning (ML) based tool. They are extensively used to extract features from a data especially image-oriented data. In this article we propose a waste classification technique which will be faster and more efficient. And we decompose the biodegradable waste by Berkley Method of composting (BKC)