 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRF-Source Seeking with Obstacle Avoidance using Real-time Modified Artificial Potential Fields in Unknown Environments
Jun 07, 2025



Navigation of UAVs in unknown environments with obstacles is essential for applications in disaster response and infrastructure monitoring. However, existing obstacle avoidance algorithms, such as Artificial Potential Field (APF) are unable to generalize across environments with different obstacle configurations. Furthermore, the precise location of the final target may not be available in applications such as search and rescue, in which case approaches such as RF source seeking can be used to align towards the target location. This paper proposes a real-time trajectory planning method, which involves real-time adaptation of APF through a sampling-based approach. The proposed approach utilizes only the bearing angle of the target without its precise location, and adjusts the potential field parameters according to the environment with new obstacle configurations in real time. The main contributions of the article are i) an RF source seeking algorithm to provide a bearing angle estimate using RF signal calculations based on antenna placement, and ii) a modified APF for adaptable collision avoidance in changing environments, which are evaluated separately in the simulation software Gazebo, using ROS2 for communication. Simulation results show that the RF source-seeking algorithm achieves high accuracy, with an average angular error of just 1.48 degrees, and with this estimate, the proposed navigation algorithm improves the success rate of reaching the target by 46% and reduces the trajectory length by 1.2% compared to standard potential fields.
Communication-free Cohesive Flexible-Object Transport using Decentralized Robot Networks
Feb 17, 2021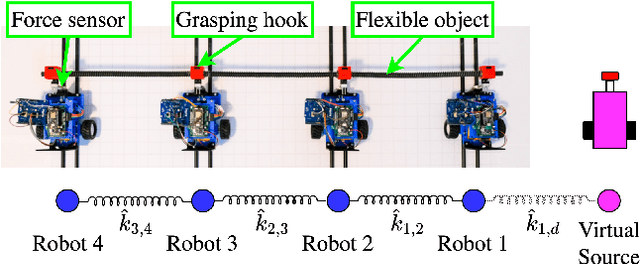
Decentralized network theories focus on achieving consensus and in speeding up the rate of convergence to consensus. However, network cohesion (i.e., maintaining consensus) during transitions between consensus values is also important when transporting flexible structures. Deviations in the robot positions due to loss of cohesion when moving flexible structures from one position to another, such as uncuredcomposite aircraft wings, can cause large deformations, which in turn, can result in potential damage. The major contribution of this work is to develop a decentralized approach to transport flexible objects in a cohesive manner using local force measurements, without the need for additional communication between the robots. Additionally, stability conditions are developed for discrete-time implementation of the proposed cohesive transition approach, and experimental results are presented, which show that the proposed cohesive transportation approach can reduce the relative deformations by 85% when compared to the case without it.
Using Machine Learning to Develop a Novel COVID-19 Vulnerability Index
Sep 22, 2020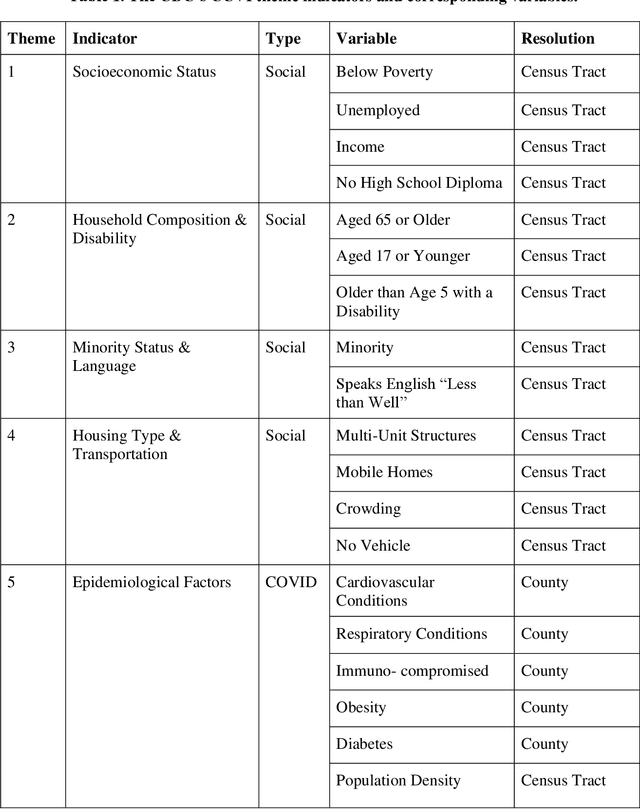
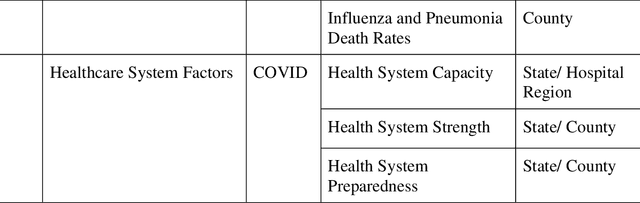
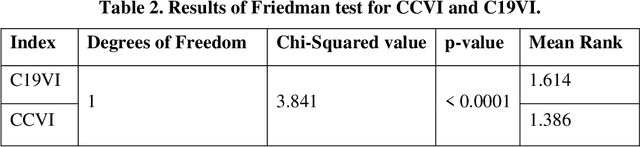
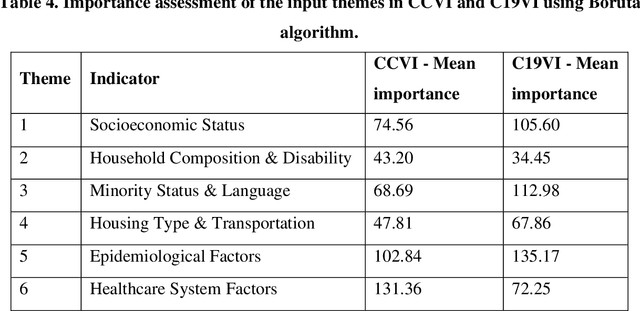
COVID19 is now one of the most leading causes of death in the United States. Systemic health, social and economic disparities have put the minorities and economically poor communities at a higher risk than others. There is an immediate requirement to develop a reliable measure of county-level vulnerabilities that can capture the heterogeneity of both vulnerable communities and the COVID19 pandemic. This study reports a COVID19 Vulnerability Index (C19VI) for identification and mapping of vulnerable counties in the United States. We proposed a Random Forest machine learning based COVID19 vulnerability model using CDC sociodemographic and COVID19-specific themes. An innovative COVID19 Impact Assessment algorithm was also developed using homogeneity and trend assessment technique for evaluating severity of the pandemic in all counties and train RF model. Developed C19VI was statistically validated and compared with the CDC COVID19 Community Vulnerability Index (CCVI). Finally, using C19VI along with census data, we explored racial inequalities and economic disparities in COVID19 health outcomes amongst different regions in the United States. Our C19VI index indicates that 18.30% of the counties falls into very high vulnerability class, 24.34% in high, 23.32% in moderate, 22.34% in low, and 11.68% in very low. Furthermore, C19VI reveals that 75.57% of racial minorities and 82.84% of economically poor communities are very high or high COVID19 vulnerable regions. The proposed approach of vulnerability modeling takes advantage of both the well-established field of statistical analysis and the fast-evolving domain of machine learning. C19VI provides an accurate and more reliable way to measure county level vulnerability in the United States. This index aims at helping emergency planners to develop more effective mitigation strategies especially for the disproportionately impacted communities.