 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHRHD-HK: A benchmark dataset of high-rise and high-density urban scenes for 3D semantic segmentation of photogrammetric point clouds
Jul 16, 2023



Many existing 3D semantic segmentation methods, deep learning in computer vision notably, claimed to achieve desired results on urban point clouds, in which the city objects are too many and diverse for people to judge qualitatively. Thus, it is significant to assess these methods quantitatively in diversified real-world urban scenes, encompassing high-rise, low-rise, high-density, and low-density urban areas. However, existing public benchmark datasets primarily represent low-rise scenes from European cities and cannot assess the methods comprehensively. This paper presents a benchmark dataset of high-rise urban point clouds, namely High-Rise, High-Density urban scenes of Hong Kong (HRHD-HK), which has been vacant for a long time. HRHD-HK arranged in 150 tiles contains 273 million colorful photogrammetric 3D points from diverse urban settings. The semantic labels of HRHD-HK include building, vegetation, road, waterbody, facility, terrain, and vehicle. To the best of our knowledge, HRHD-HK is the first photogrammetric dataset that focuses on HRHD urban areas. This paper also comprehensively evaluates eight popular semantic segmentation methods on the HRHD-HK dataset. Experimental results confirmed plenty of room for enhancing the current 3D semantic segmentation of point clouds, especially for city objects with small volumes. Our dataset is publicly available at: https://github.com/LuZaiJiaoXiaL/HRHD-HK.
Outlier Detection In Large-scale Traffic Data By Naïve Bayes Method and Gaussian Mixture Model Method
Dec 28, 2015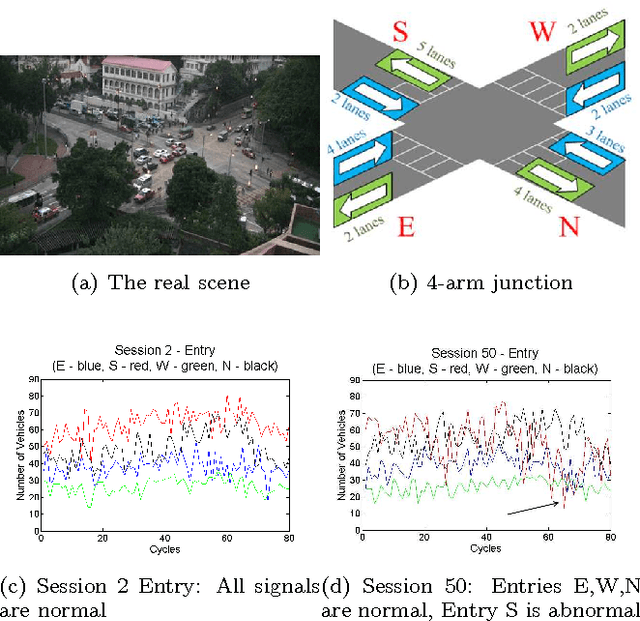
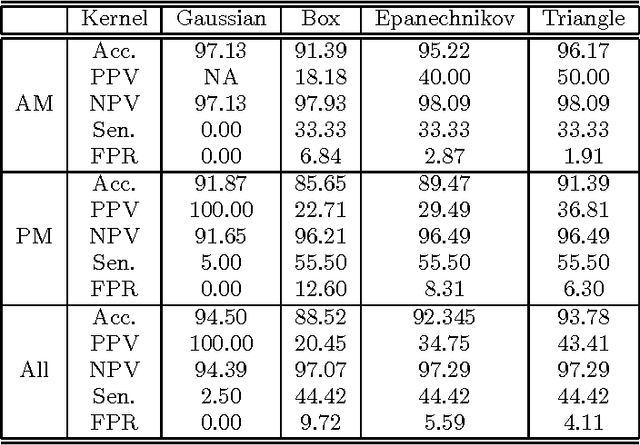
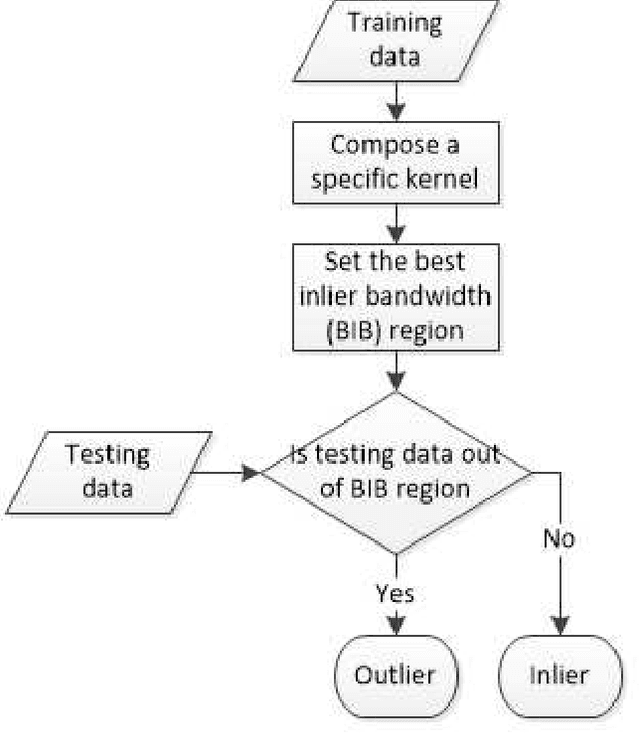
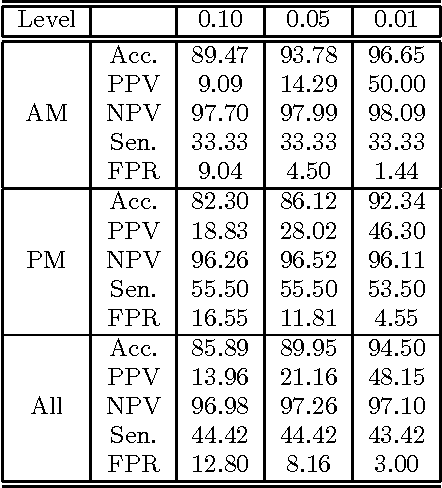
It is meaningful to detect outliers in traffic data for traffic management. However, this is a massive task for people from large-scale database to distinguish outliers. In this paper, we present two methods: Kernel Smoothing Na\"ive Bayes (NB) method and Gaussian Mixture Model (GMM) method to automatically detect any hardware errors as well as abnormal traffic events in traffic data collected at a four-arm junction in Hong Kong. Traffic data was recorded in a video format, and converted to spatial-temporal (ST) traffic signals by statistics. The ST signals are then projected to a two-dimensional (2D) (x,y)-coordinate plane by Principal Component Analysis (PCA) for dimension reduction. We assume that inlier data are normal distributed. As such, the NB and GMM methods are successfully applied in outlier detection (OD) for traffic data. The kernel smooth NB method assumes the existence of kernel distributions in traffic data and uses Bayes' Theorem to perform OD. In contrast, the GMM method believes the traffic data is formed by the mixture of Gaussian distributions and exploits confidence region for OD. This paper would address the modeling of each method and evaluate their respective performances. Experimental results show that the NB algorithm with Triangle kernel and GMM method achieve up to 93.78% and 94.50% accuracies, respectively.