 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXRefine: Attention-Guided Keypoint Match Refinement
Jan 18, 2026Sparse keypoint matching is crucial for 3D vision tasks, yet current keypoint detectors often produce spatially inaccurate matches. Existing refinement methods mitigate this issue through alignment of matched keypoint locations, but they are typically detector-specific, requiring retraining for each keypoint detector. We introduce XRefine, a novel, detector-agnostic approach for sub-pixel keypoint refinement that operates solely on image patches centered at matched keypoints. Our cross-attention-based architecture learns to predict refined keypoint coordinates without relying on internal detector representations, enabling generalization across detectors. Furthermore, XRefine can be extended to handle multi-view feature tracks. Experiments on MegaDepth, KITTI, and ScanNet demonstrate that the approach consistently improves geometric estimation accuracy, achieving superior performance compared to existing refinement methods while maintaining runtime efficiency. Our code and trained models can be found at https://github.com/boschresearch/xrefine.
Modeling dynamic target deformation in camera calibration
Oct 14, 2021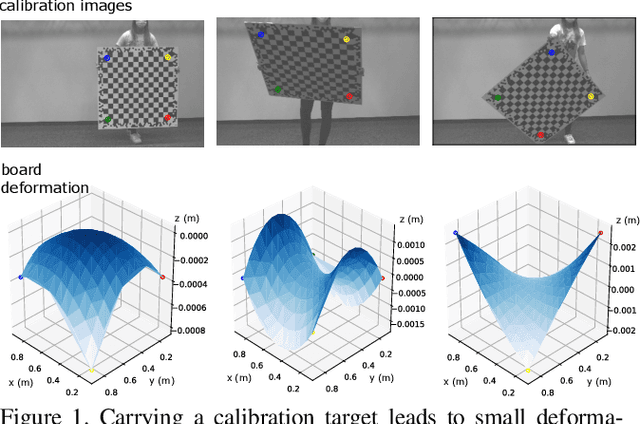
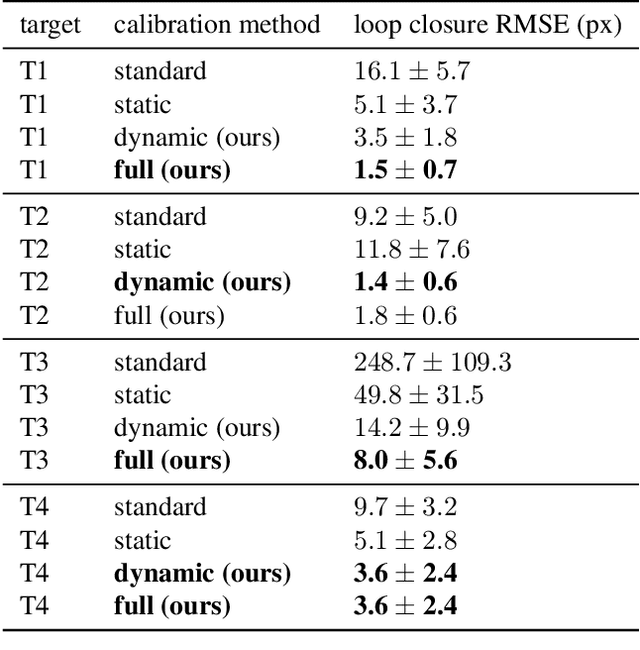
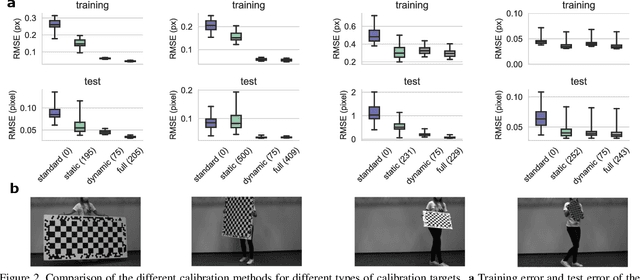
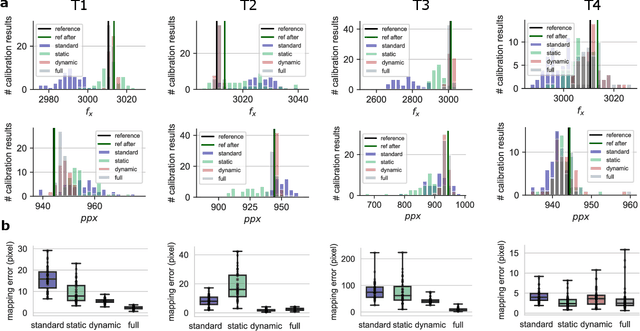
Most approaches to camera calibration rely on calibration targets of well-known geometry. During data acquisition, calibration target and camera system are typically moved w.r.t. each other, to allow image coverage and perspective versatility. We show that moving the target can lead to small temporary deformations of the target, which can introduce significant errors into the calibration result. While static inaccuracies of calibration targets have been addressed in previous works, to our knowledge, none of the existing approaches can capture time-varying, dynamic deformations. To achieve high-accuracy calibrations despite moving the target, we propose a way to explicitly model dynamic target deformations in camera calibration. This is achieved by using a low-dimensional deformation model with only few parameters per image, which can be optimized jointly with target poses and intrinsics. We demonstrate the effectiveness of modeling dynamic deformations using different calibration targets and show its significance in a structure-from-motion application.
Inferring bias and uncertainty in camera calibration
Jul 28, 2021
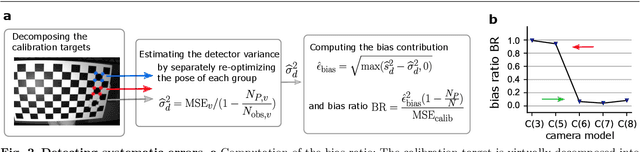
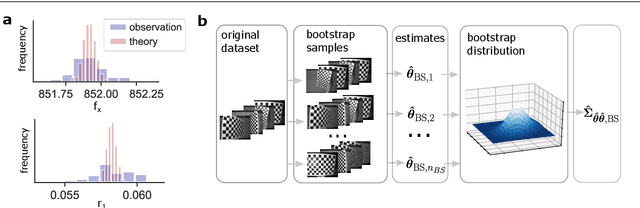
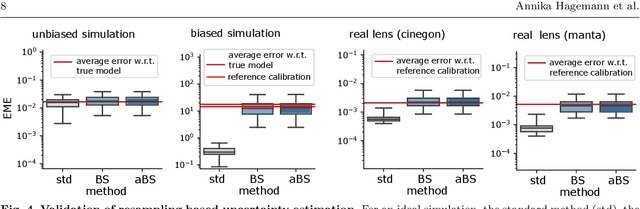
Accurate camera calibration is a precondition for many computer vision applications. Calibration errors, such as wrong model assumptions or imprecise parameter estimation, can deteriorate a system's overall performance, making the reliable detection and quantification of these errors critical. In this work, we introduce an evaluation scheme to capture the fundamental error sources in camera calibration: systematic errors (biases) and uncertainty (variance). The proposed bias detection method uncovers smallest systematic errors and thereby reveals imperfections of the calibration setup and provides the basis for camera model selection. A novel resampling-based uncertainty estimator enables uncertainty estimation under non-ideal conditions and thereby extends the classical covariance estimator. Furthermore, we derive a simple uncertainty metric that is independent of the camera model. In combination, the proposed methods can be used to assess the accuracy of individual calibrations, but also to benchmark new calibration algorithms, camera models, or calibration setups. We evaluate the proposed methods with simulations and real cameras.