 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManufacturing Micro-Patterned Surfaces with Multi-Robot Systems
Mar 18, 2026Applying micro-patterns to surfaces has been shown to impart useful physical properties such as drag reduction and hydrophobicity. However, current manufacturing techniques cannot produce micro-patterned surfaces at scale due to high-cost machinery and inefficient coverage techniques such as raster-scanning. In this work, we use multiple robots, each equipped with a patterning tool, to manufacture these surfaces. To allow these robots to coordinate during the patterning task, we use the ergodic control algorithm, which specifies coverage objectives using distributions. We demonstrate that robots can divide complicated coverage objectives by communicating compressed representations of their trajectory history both in simulations and experimental trials. Further, we show that robot-produced patterning can lower the coefficient of friction of metallic surfaces. This work demonstrates that distributed multi-robot systems can coordinate to manufacture products that were previously unrealizable at scale.
Active Learning in Robotics: A Review of Control Principles
Jun 25, 2021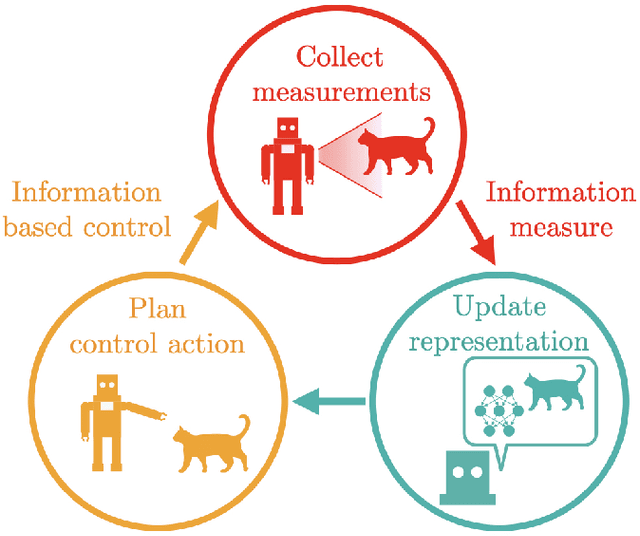
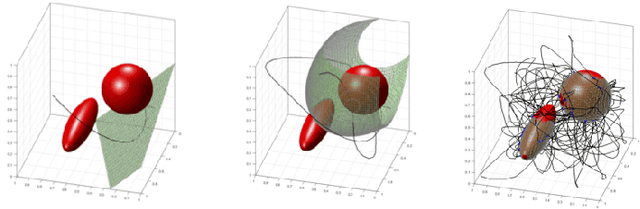
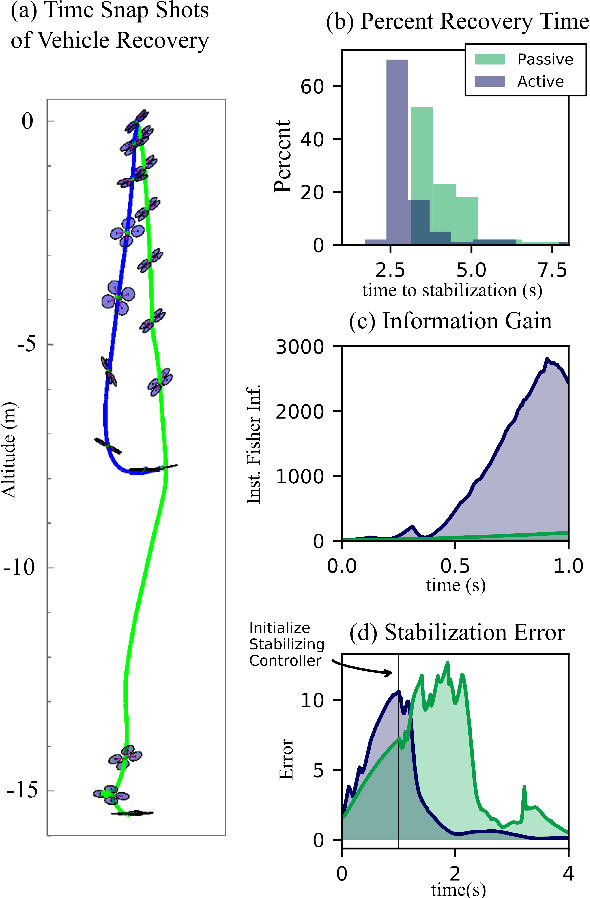
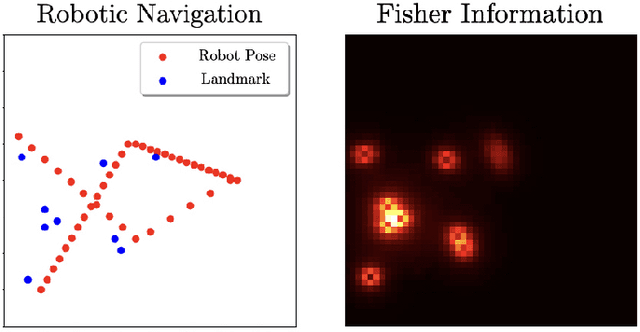
Active learning is a decision-making process. In both abstract and physical settings, active learning demands both analysis and action. This is a review of active learning in robotics, focusing on methods amenable to the demands of embodied learning systems. Robots must be able to learn efficiently and flexibly through continuous online deployment. This poses a distinct set of control-oriented challenges -- one must choose suitable measures as objectives, synthesize real-time control, and produce analyses that guarantee performance and safety with limited knowledge of the environment or robot itself. In this work, we survey the fundamental components of robotic active learning systems. We discuss classes of learning tasks that robots typically encounter, measures with which they gauge the information content of observations, and algorithms for generating action plans. Moreover, we provide a variety of examples -- from environmental mapping to nonparametric shape estimation -- that highlight the qualitative differences between learning tasks, information measures, and control techniques. We conclude with a discussion of control-oriented open challenges, including safety-constrained learning and distributed learning.
* 25 pages