 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning for Safe Landing of a Human-Piloted Parafoil
Dec 11, 2025Most skydiving accidents occur during the parafoil-piloting and landing stages and result from human lapses in judgment while piloting the parafoil. Training of novice pilots is protracted due to the lack of functional and easily accessible training simulators. Moreover, work on parafoil trajectory planning suitable for aiding human training remains limited. To bridge this gap, we study the problem of computing safe trajectories for human-piloted parafoil flight and examine how such trajectories fare against human-generated solutions. For the algorithmic part, we adapt the sampling-based motion planner Stable Sparse RRT (SST) by Li et al., to cope with the problem constraints while minimizing the bank angle (control effort) as a proxy for safety. We then compare the computer-generated solutions with data from human-generated parafoil flight, where the algorithm offers a relative cost improvement of 20\%-80\% over the performance of the human pilot. We observe that human pilots tend to, first, close the horizontal distance to the landing area, and then address the vertical gap by spiraling down to the suitable altitude for starting a landing maneuver. The algorithm considered here makes smoother and more gradual descents, arriving at the landing area at the precise altitude necessary for the final approach while maintaining safety constraints. Overall, the study demonstrates the potential of computer-generated guidelines, rather than traditional rules of thumb, which can be integrated into future simulators to train pilots for safer and more cost-effective flights.
A Dynamic Model of a Skydiver With Validation in Wind Tunnel and Free Fall
Feb 16, 2022
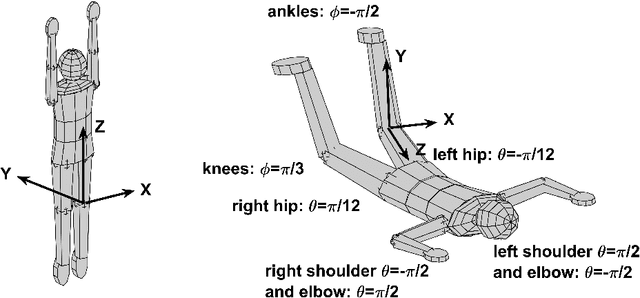
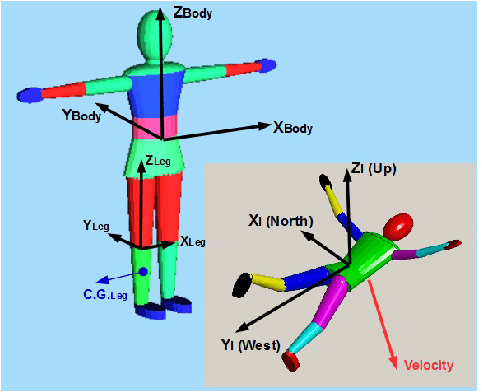
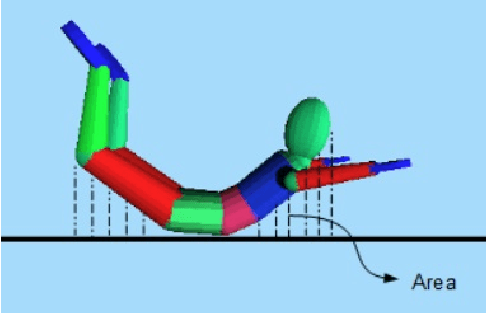
An innovative approach of gaining insight into motor skills involved in human body flight is proposed. The key idea is the creation of a model autonomous system capable of virtually performing skydiving maneuvers. A dynamic skydiver model and simulator is developed, comprising biomechanical, aerodynamic, and kinematic models, dynamic equations of motion, and a virtual reality environment. Limb relative orientations, and resulting inertial body angular position and velocity are measured in skydiving experiments in a vertical wind tunnel and in free fall. These experimental data are compared with corresponding simulation data to tune and verify the model for basic skydiving maneuvers. The model is further extended to reconstruct advanced aerial maneuvers, such as transitions between stable equilibria. The experimental data are used to estimate skydiver's conscious inputs as a function of time, via an Unscented Kalman Filter modified for this purpose.
An Automatic Control System with Human-in-the-Loop for Training Skydiving Maneuvers: Proof-of-Concept Experiment
Jan 20, 2022



A real-time motion training system for skydiving is proposed. Aerial maneuvers are performed by changing the body posture and thus deflecting the surrounding airflow. The natural learning process is extremely slow due to unfamiliar free-fall dynamics, stress induced blocking of kinesthetic feedback, and complexity of the required movements. The key idea is to augment the learner with an automatic control system that would be able to perform the trained activity if it had direct access to the learner's body as an actuator. The aiding system will supply the following visual cues to the learner: 1. Feedback of the current body posture; 2. The body posture that would bring the body to perform the desired maneuver; 3. Prediction of the future inertial position and orientation if the body retains its present posture. The system will enable novices to maintain stability in free-fall and perceive the unfamiliar environmental dynamics, thus accelerating the initial stages of skill acquisition. This paper presents results of a Proof-of-Concept experiment, whereby humans controlled a virtual skydiver free-falling in a computer simulation, by the means of their bodies. This task was impossible without the aiding system, enabling all participants to complete the task at the first attempt.