 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCObL: Toward Zero-Shot Ordinal Layering without User Prompting
Aug 11, 2025



Vision benefits from grouping pixels into objects and understanding their spatial relationships, both laterally and in depth. We capture this with a scene representation comprising an occlusion-ordered stack of "object layers," each containing an isolated and amodally-completed object. To infer this representation from an image, we introduce a diffusion-based architecture named Concurrent Object Layers (CObL). CObL generates a stack of object layers in parallel, using Stable Diffusion as a prior for natural objects and inference-time guidance to ensure the inferred layers composite back to the input image. We train CObL using a few thousand synthetically-generated images of multi-object tabletop scenes, and we find that it zero-shot generalizes to photographs of real-world tabletops with varying numbers of novel objects. In contrast to recent models for amodal object completion, CObL reconstructs multiple occluded objects without user prompting and without knowing the number of objects beforehand. Unlike previous models for unsupervised object-centric representation learning, CObL is not limited to the world it was trained in.
Shallow Univariate ReLu Networks as Splines: Initialization, Loss Surface, Hessian, & Gradient Flow Dynamics
Aug 04, 2020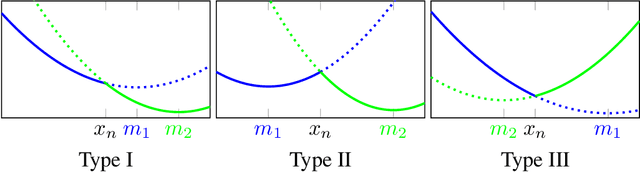

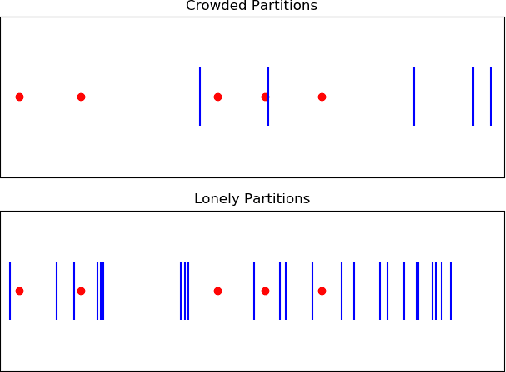
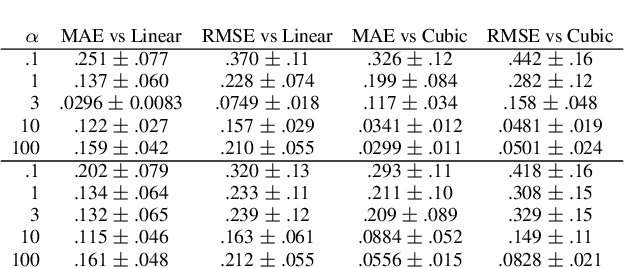
Understanding the learning dynamics and inductive bias of neural networks (NNs) is hindered by the opacity of the relationship between NN parameters and the function represented. We propose reparametrizing ReLU NNs as continuous piecewise linear splines. Using this spline lens, we study learning dynamics in shallow univariate ReLU NNs, finding unexpected insights and explanations for several perplexing phenomena. We develop a surprisingly simple and transparent view of the structure of the loss surface, including its critical and fixed points, Hessian, and Hessian spectrum. We also show that standard weight initializations yield very flat functions, and that this flatness, together with overparametrization and the initial weight scale, is responsible for the strength and type of implicit regularization, consistent with recent work arXiv:1906.05827. Our implicit regularization results are complementary to recent work arXiv:1906.07842, done independently, which showed that initialization scale critically controls implicit regularization via a kernel-based argument. Our spline-based approach reproduces their key implicit regularization results but in a far more intuitive and transparent manner. Going forward, our spline-based approach is likely to extend naturally to the multivariate and deep settings, and will play a foundational role in efforts to understand neural networks. Videos of learning dynamics using a spline-based visualization are available at http://shorturl.at/tFWZ2.