 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopological Information-Theoretic Belief Space Planning with Optimality Guarantees
Mar 03, 2019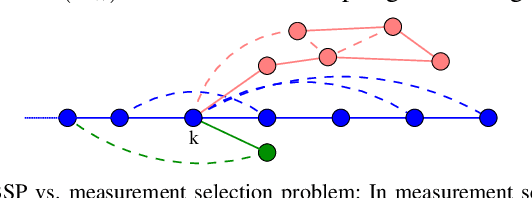
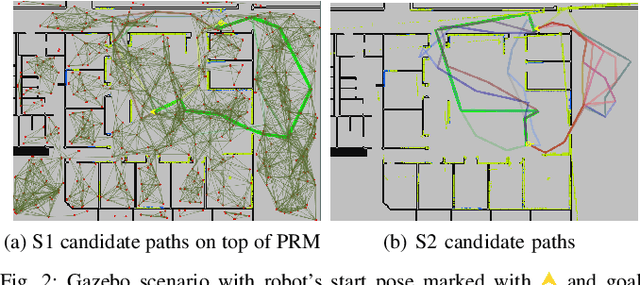
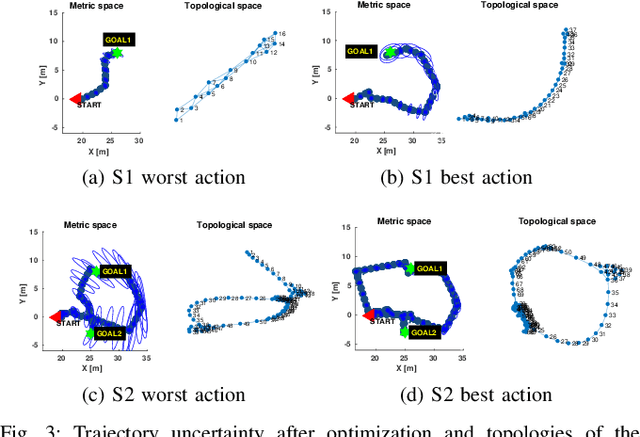
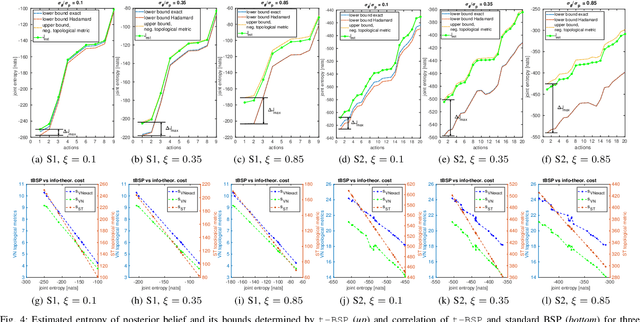
Determining a globally optimal solution of belief space planning (BSP) in high-dimensional state spaces is computationally expensive, as it involves belief propagation and objective function evaluation for each candidate action. Our recently introduced topological belief space planning t-bsp instead performs decision making considering only topologies of factor graphs that correspond to posterior future beliefs. In this paper we contribute to this body of work a novel method for efficiently determining error bounds of t-bsp, thereby providing global optimality guarantees or uncertainty margin of its solution. The bounds are given with respect to an optimal solution of information theoretic BSP considering the previously introduced topological metric which is based on the number of spanning trees. In realistic and synthetic simulations, we analyze tightness of these bounds and show empirically how this metric is closely related to another computationally more efficient t-bsp metric, an approximation of the von Neumann entropy of a graph, which can achieve online performance.
Global Localization Based on 3D Planar Surface Segments
Oct 01, 2013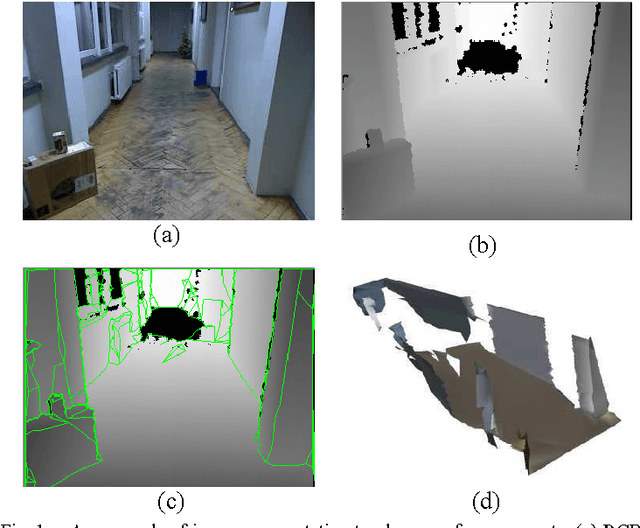
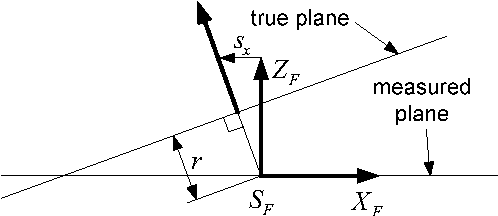
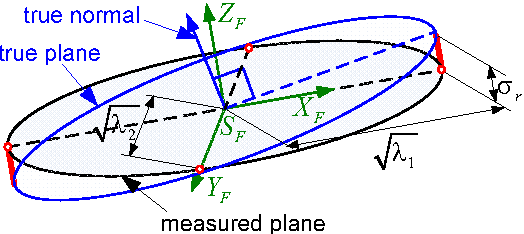
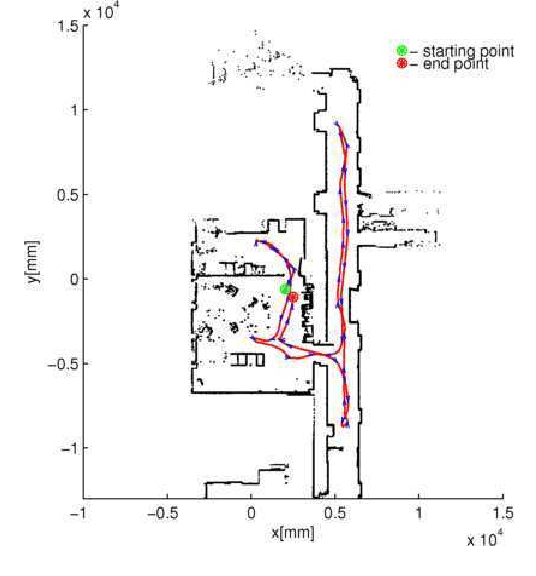
Global localization of a mobile robot using planar surface segments extracted from depth images is considered. The robot's environment is represented by a topological map consisting of local models, each representing a particular location modeled by a set of planar surface segments. The discussed localization approach segments a depth image acquired by a 3D camera into planar surface segments which are then matched to model surface segments. The robot pose is estimated by the Extended Kalman Filter using surface segment pairs as measurements. The reliability and accuracy of the considered approach are experimentally evaluated using a mobile robot equipped by a Microsoft Kinect sensor.