 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Inference for Uncertainty on the Inputs of Gaussian Process Models
Sep 08, 2014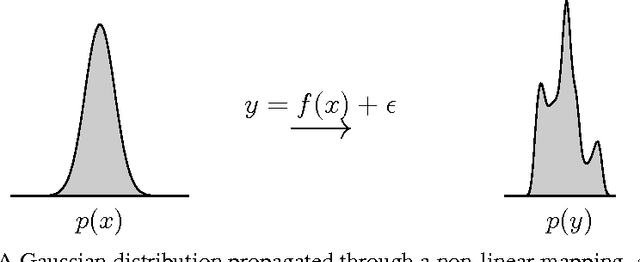

The Gaussian process latent variable model (GP-LVM) provides a flexible approach for non-linear dimensionality reduction that has been widely applied. However, the current approach for training GP-LVMs is based on maximum likelihood, where the latent projection variables are maximized over rather than integrated out. In this paper we present a Bayesian method for training GP-LVMs by introducing a non-standard variational inference framework that allows to approximately integrate out the latent variables and subsequently train a GP-LVM by maximizing an analytic lower bound on the exact marginal likelihood. We apply this method for learning a GP-LVM from iid observations and for learning non-linear dynamical systems where the observations are temporally correlated. We show that a benefit of the variational Bayesian procedure is its robustness to overfitting and its ability to automatically select the dimensionality of the nonlinear latent space. The resulting framework is generic, flexible and easy to extend for other purposes, such as Gaussian process regression with uncertain inputs and semi-supervised Gaussian processes. We demonstrate our method on synthetic data and standard machine learning benchmarks, as well as challenging real world datasets, including high resolution video data.
Deep Gaussian Processes
Mar 23, 2013

In this paper we introduce deep Gaussian process (GP) models. Deep GPs are a deep belief network based on Gaussian process mappings. The data is modeled as the output of a multivariate GP. The inputs to that Gaussian process are then governed by another GP. A single layer model is equivalent to a standard GP or the GP latent variable model (GP-LVM). We perform inference in the model by approximate variational marginalization. This results in a strict lower bound on the marginal likelihood of the model which we use for model selection (number of layers and nodes per layer). Deep belief networks are typically applied to relatively large data sets using stochastic gradient descent for optimization. Our fully Bayesian treatment allows for the application of deep models even when data is scarce. Model selection by our variational bound shows that a five layer hierarchy is justified even when modelling a digit data set containing only 150 examples.
Variational Gaussian Process Dynamical Systems
Jul 25, 2011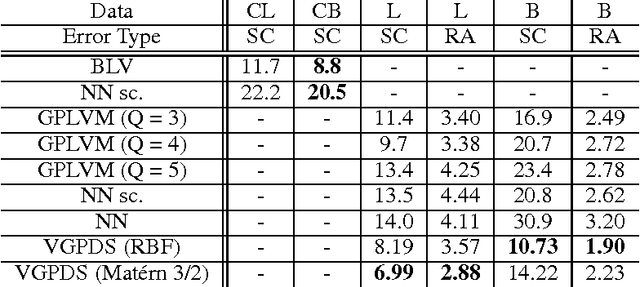
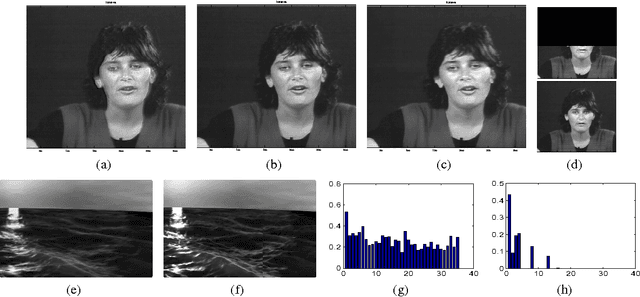

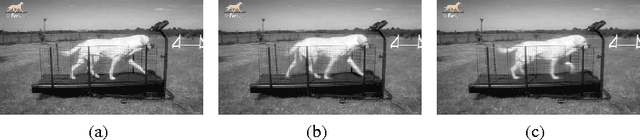
High dimensional time series are endemic in applications of machine learning such as robotics (sensor data), computational biology (gene expression data), vision (video sequences) and graphics (motion capture data). Practical nonlinear probabilistic approaches to this data are required. In this paper we introduce the variational Gaussian process dynamical system. Our work builds on recent variational approximations for Gaussian process latent variable models to allow for nonlinear dimensionality reduction simultaneously with learning a dynamical prior in the latent space. The approach also allows for the appropriate dimensionality of the latent space to be automatically determined. We demonstrate the model on a human motion capture data set and a series of high resolution video sequences.