 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMPC-Guided Safe Reinforcement Learning and Lipschitz-Based Filtering for Structured Nonlinear Systems
Dec 14, 2025



Modern engineering systems, such as autonomous vehicles, flexible robotics, and intelligent aerospace platforms, require controllers that are robust to uncertainties, adaptive to environmental changes, and safety-aware under real-time constraints. RL offers powerful data-driven adaptability for systems with nonlinear dynamics that interact with uncertain environments. RL, however, lacks built-in mechanisms for dynamic constraint satisfaction during exploration. MPC offers structured constraint handling and robustness, but its reliance on accurate models and computationally demanding online optimization may pose significant challenges. This paper proposes an integrated MPC-RL framework that combines stability and safety guarantees of MPC with the adaptability of RL. During training, MPC defines safe control bounds that guide the RL component and that enable constraint-aware policy learning. At deployment, the learned policy operates in real time with a lightweight safety filter based on Lipschitz continuity to ensure constraint satisfaction without heavy online optimizations. The approach, which is validated on a nonlinear aeroelastic wing system, demonstrates improved disturbance rejection, reduced actuator effort, and robust performance under turbulence. The architecture generalizes to other domains with structured nonlinearities and bounded disturbances, offering a scalable solution for safe artificial-intelligence-driven control in engineering applications.
Enabling Robots to Autonomously Search Dynamic Cluttered Post-Disaster Environments
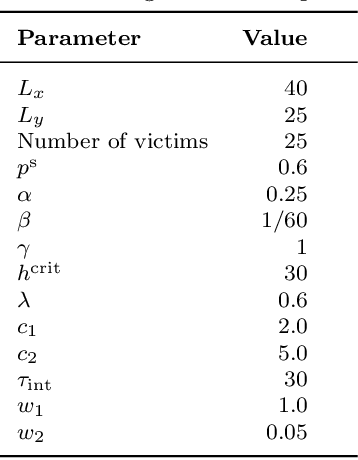
May 06, 2025Robots will bring search and rescue (SaR) in disaster response to another level, in case they can autonomously take over dangerous SaR tasks from humans. A main challenge for autonomous SaR robots is to safely navigate in cluttered environments with uncertainties, while avoiding static and moving obstacles. We propose an integrated control framework for SaR robots in dynamic, uncertain environments, including a computationally efficient heuristic motion planning system that provides a nominal (assuming there are no uncertainties) collision-free trajectory for SaR robots and a robust motion tracking system that steers the robot to track this reference trajectory, taking into account the impact of uncertainties. The control architecture guarantees a balanced trade-off among various SaR objectives, while handling the hard constraints, including safety. The results of various computer-based simulations, presented in this paper, showed significant out-performance (of up to 42.3%) of the proposed integrated control architecture compared to two commonly used state-of-the-art methods (Rapidly-exploring Random Tree and Artificial Potential Function) in reaching targets (e.g., trapped victims in SaR) safely, collision-free, and in the shortest possible time.
Model Predictive Fuzzy Control: A Hierarchical Multi-Agent Control Architecture for Outdoor Search-and-Rescue Robots
May 06, 2025



Autonomous robots deployed in unknown search-and-rescue (SaR) environments can significantly improve the efficiency of the mission by assisting in fast localisation and rescue of the trapped victims. We propose a novel integrated hierarchical control architecture, called model predictive fuzzy control (MPFC), for autonomous mission planning of multi-robot SaR systems that should efficiently map an unknown environment: We combine model predictive control (MPC) and fuzzy logic control (FLC), where the robots are locally controlled by computationally efficient FLC controllers, and the parameters of these local controllers are tuned via a centralised MPC controller, in a regular or event-triggered manner. The proposed architecture provides three main advantages: (1) The control decisions are made by the FLC controllers, thus the real-time computation time is affordable. (2) The centralised MPC controller optimises the performance criteria with a global and predictive vision of the system dynamics, and updates the parameters of the FLC controllers accordingly. (3) FLC controllers are heuristic by nature and thus do not take into account optimality in their decisions, while the tuned parameters via the MPC controller can indirectly incorporate some level of optimality in local decisions of the robots. A simulation environment for victim detection in a disaster environment was designed in MATLAB using discrete, 2-D grid-based models. While being comparable from the point of computational efficiency, the integrated MPFC architecture improves the performance of the multi-robot SaR system compared to decentralised FLC controllers. Moreover, the performance of MPFC is comparable to the performance of centralised MPC for path planning of SaR robots, whereas MPFC requires significantly less computational resources, since the number of the optimisation variables in the control problem are reduced.
Leveraging Systems and Control Theory for Social Robotics: A Model-Based Behavioral Control Approach to Human-Robot Interaction
Apr 30, 2025



Social robots (SRs) should autonomously interact with humans, while exhibiting proper social behaviors associated to their role. By contributing to health-care, education, and companionship, SRs will enhance life quality. However, personalization and sustaining user engagement remain a challenge for SRs, due to their limited understanding of human mental states. Accordingly, we leverage a recently introduced mathematical dynamic model of human perception, cognition, and decision-making for SRs. Identifying the parameters of this model and deploying it in behavioral steering system of SRs allows to effectively personalize the responses of SRs to evolving mental states of their users, enhancing long-term engagement and personalization. Our approach uniquely enables autonomous adaptability of SRs by modeling the dynamics of invisible mental states, significantly contributing to the transparency and awareness of SRs. We validated our model-based control system in experiments with 10 participants who interacted with a Nao robot over three chess puzzle sessions, 45 - 90 minutes each. The identified model achieved a mean squared error (MSE) of 0.067 (i.e., 1.675% of the maximum possible MSE) in tracking beliefs, goals, and emotions of participants. Compared to a model-free controller that did not track mental states of participants, our approach increased engagement by 16% on average. Post-interaction feedback of participants (provided via dedicated questionnaires) further confirmed the perceived engagement and awareness of the model-driven robot. These results highlight the unique potential of model-based approaches and control theory in advancing human-SR interactions.
Fuzzy-Logic-based model predictive control: A paradigm integrating optimal and common-sense decision making
Mar 27, 2025



This paper introduces a novel concept, fuzzy-logic-based model predictive control (FLMPC), along with a multi-robot control approach for exploring unknown environments and locating targets. Traditional model predictive control (MPC) methods rely on Bayesian theory to represent environmental knowledge and optimize a stochastic cost function, often leading to high computational costs and lack of effectiveness in locating all the targets. Our approach instead leverages FLMPC and extends it to a bi-level parent-child architecture for enhanced coordination and extended decision making horizon. Extracting high-level information from probability distributions and local observations, FLMPC simplifies the optimization problem and significantly extends its operational horizon compared to other MPC methods. We conducted extensive simulations in unknown 2-dimensional environments with randomly placed obstacles and humans. We compared the performance and computation time of FLMPC against MPC with a stochastic cost function, then evaluated the impact of integrating the high-level parent FLMPC layer. The results indicate that our approaches significantly improve both performance and computation time, enhancing coordination of robots and reducing the impact of uncertainty in large-scale search and rescue environments.
A note on the potentials of probabilistic and fuzzy logic
Sep 29, 2022



This paper mainly focuses on (1) a generalized treatment of fuzzy sets of type $n$, where $n$ is an integer larger than or equal to $1$, with an example, mathematical discussions, and real-life interpretation of the given mathematical concepts; (2) the potentials and links between fuzzy logic and probability logic that have not been discussed in one document in literature; (3) representation of real-life random and fuzzy uncertainties and ambiguities that arise in data-driven real-life problems, due to uncertain mathematical and vague verbal terms in datasets.
Hierarchical Integration of Model Predictive and Fuzzy Logic Control for Combined Coverage and Target-Oriented Search-and-Rescue via Robots with Imperfect Sensors
Sep 28, 2022


Search-and-rescue (SaR) in unknown environments requires precise, optimal, and fast decisions. Robots are promising candidates for autonomously performing SaR tasks in unknown environments. While humans use their heuristics to effectively deal with uncertainties, optimisation of multiple objectives in the presence of physical and control constraints is a mathematical challenge that requires machine computations. Thus having both human-inspired and mathematical control capabilities is desired for SaR robots. Moreover, coordinating the decisions of robots with little computation cost in large-scale SaR missions is an open challenge. Finally, in real-life data perceived by SaR robots may be prone to uncertainties. We introduce a hierarchical multi-agent control architecture that exploits non-homogeneous and imperfect perception capabilities of SaR robots, as well as the computational efficiency and robustness to failure of decentralised control methods and global performance improvement of centralised control methods. The integrated structure of the proposed control framework allows to combine human-inspired and mathematical decision making methods in a coordinated and computationally efficient way. The results of various computer-based simulations show that while the area coverage of the proposed approach is comparable to existing heuristic methods that are particularly developed for coverage-oriented SaR, the efficiency of the introduced approach in locating the trapped victims is significantly higher. Furthermore, with comparable computation times, the proposed control approach successfully avoids potential conflicts that exist in non-cooperative methods. These results confirm that the proposed multi-agent control system is capable of combining coverage-oriented and target-oriented SaR in a balanced and coordinated way.