 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTuning Path Tracking Controllers for Autonomous Cars Using Reinforcement Learning
Jan 09, 2023This paper proposes an adaptable path tracking control system based on Reinforcement Learning (RL) for autonomous cars. A four-parameter controller shapes the behavior of the vehicle to navigate on lane changes and roundabouts. The tuning of the tracker uses an educated Q-Learning algorithm to minimize the lateral and steering trajectory errors. The CARLA simulation environment was used both for training and testing. The results show the vehicle is able to adapt its behavior to the different types of reference trajectories, navigating safely with low tracking errors. The use of a ROS bridge between the CARLA and the tracker results (i) in a realistic system, and (ii) simplifies the replacement of the CARLA by a real vehicle. An argument on the dependability of the overall architecture based on stability results of non-smooth systems is presented at the end of the paper.
Adapting Behaviour Based On Trust In Human-Agent Ad Hoc Teamwork
Oct 13, 2022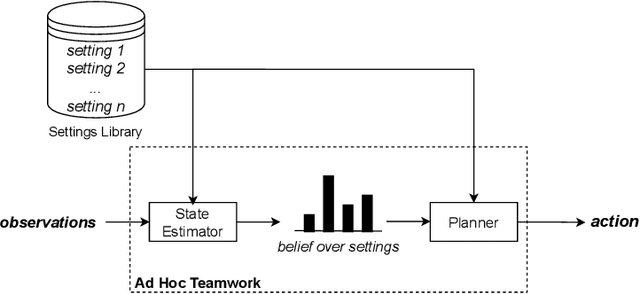
This work proposes a framework that incorporates trust in an ad hoc teamwork scenario with human-agent teams, where an agent must collaborate with a human to perform a task. During the task, the agent must infer, through interactions and observations, how much the human trusts it and adapt its behaviour to maximize the team's performance. To achieve this, we propose collecting data from human participants in experiments to define different settings (based on trust levels) and learning optimal policies for each of them. Then, we create a module to infer the current setting (depending on the amount of trust). Finally, we validate this framework in a real-world scenario and analyse how this adaptable behaviour affects trust.