 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA multi-model approach using XAI and anomaly detection to predict asteroid hazards
Mar 20, 2025The potential for catastrophic collision makes near-Earth asteroids (NEAs) a serious concern. Planetary defense depends on accurately classifying potentially hazardous asteroids (PHAs), however the complexity of the data hampers conventional techniques. This work offers a sophisticated method for accurately predicting hazards by combining machine learning, deep learning, explainable AI (XAI), and anomaly detection. Our approach extracts essential parameters like size, velocity, and trajectory from historical and real-time asteroid data. A hybrid algorithm improves prediction accuracy by combining several cutting-edge models. A forecasting module predicts future asteroid behavior, and Monte Carlo simulations evaluate the likelihood of collisions. Timely mitigation is made possible by a real-time alarm system that notifies worldwide monitoring stations. This technique enhances planetary defense efforts by combining real-time alarms with sophisticated predictive modeling.
Easydiagnos: a framework for accurate feature selection for automatic diagnosis in smart healthcare
Oct 01, 2024The rapid advancements in artificial intelligence (AI) have revolutionized smart healthcare, driving innovations in wearable technologies, continuous monitoring devices, and intelligent diagnostic systems. However, security, explainability, robustness, and performance optimization challenges remain critical barriers to widespread adoption in clinical environments. This research presents an innovative algorithmic method using the Adaptive Feature Evaluator (AFE) algorithm to improve feature selection in healthcare datasets and overcome problems. AFE integrating Genetic Algorithms (GA), Explainable Artificial Intelligence (XAI), and Permutation Combination Techniques (PCT), the algorithm optimizes Clinical Decision Support Systems (CDSS), thereby enhancing predictive accuracy and interpretability. The proposed method is validated across three diverse healthcare datasets using six distinct machine learning algorithms, demonstrating its robustness and superiority over conventional feature selection techniques. The results underscore the transformative potential of AFE in smart healthcare, enabling personalized and transparent patient care. Notably, the AFE algorithm, when combined with a Multi-layer Perceptron (MLP), achieved an accuracy of up to 98.5%, highlighting its capability to improve clinical decision-making processes in real-world healthcare applications.
A Survey of Reinforcement Learning Techniques: Strategies, Recent Development, and Future Directions
Jan 27, 2020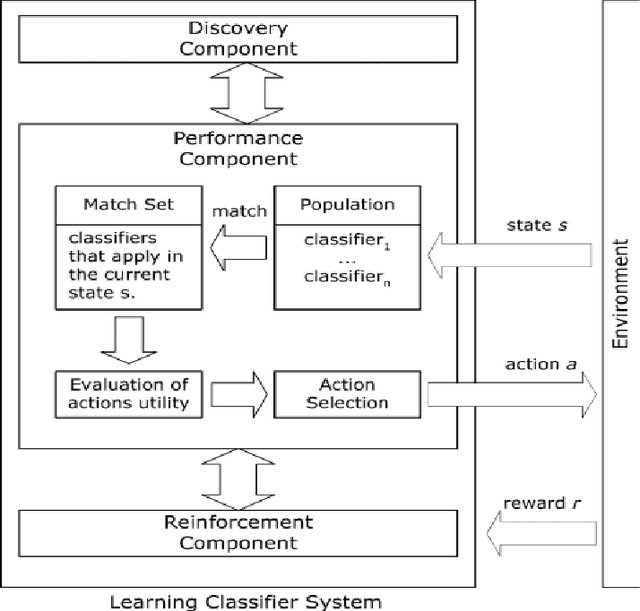


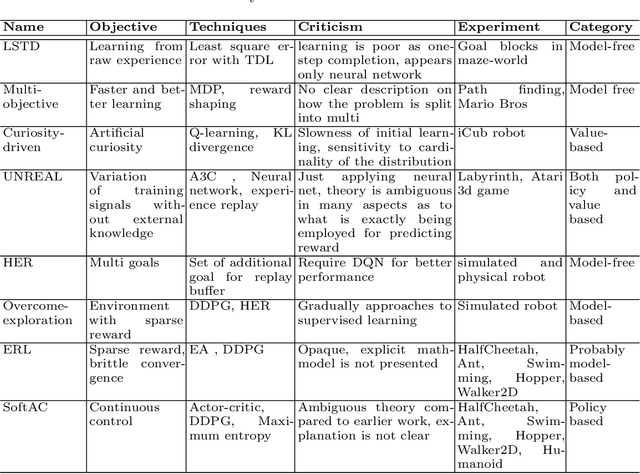
Reinforcement learning is one of the core components in designing an artificial intelligent system emphasizing real-time response. Reinforcement learning influences the system to take actions within an arbitrary environment either having previous knowledge about the environment model or not. In this paper, we present a comprehensive study on Reinforcement Learning focusing on various dimensions including challenges, the recent development of different state-of-the-art techniques, and future directions. The fundamental objective of this paper is to provide a framework for the presentation of available methods of reinforcement learning that is informative enough and simple to follow for the new researchers and academics in this domain considering the latest concerns. First, we illustrated the core techniques of reinforcement learning in an easily understandable and comparable way. Finally, we analyzed and depicted the recent developments in reinforcement learning approaches. My analysis pointed out that most of the models focused on tuning policy values rather than tuning other things in a particular state of reasoning.
Incremental Real-Time Multibody VSLAM with Trajectory Optimization Using Stereo Camera
Aug 02, 2016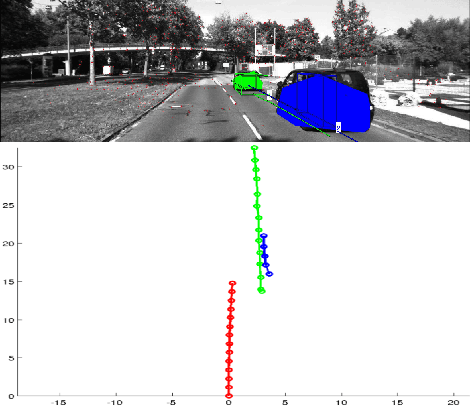
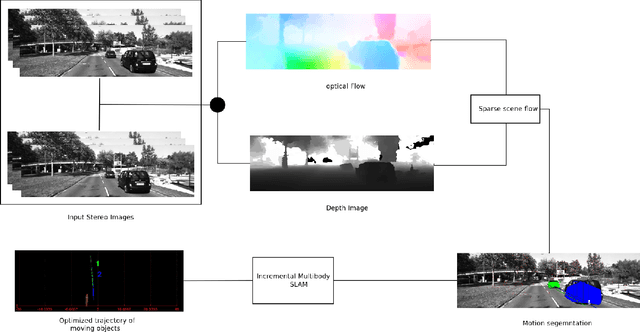
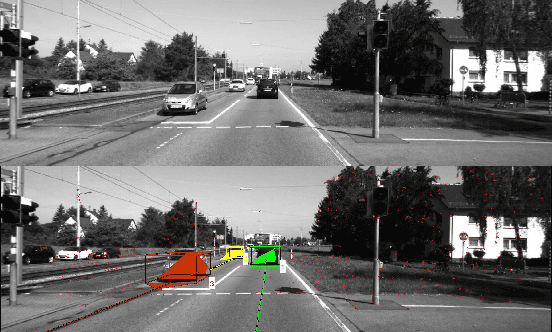
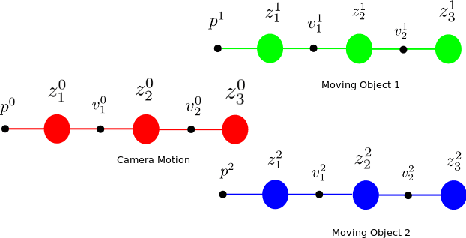
Real time outdoor navigation in highly dynamic environments is an crucial problem. The recent literature on real time static SLAM don't scale up to dynamic outdoor environments. Most of these methods assume moving objects as outliers or discard the information provided by them. We propose an algorithm to jointly infer the camera trajectory and the moving object trajectory simultaneously. In this paper, we perform a sparse scene flow based motion segmentation using a stereo camera. The segmented objects motion models are used for accurate localization of the camera trajectory as well as the moving objects. We exploit the relationship between moving objects for improving the accuracy of the poses. We formulate the poses as a factor graph incorporating all the constraints. We achieve exact incremental solution by solving a full nonlinear optimization problem in real time. The evaluation is performed on the challenging KITTI dataset with multiple moving cars.Our method outperforms the previous baselines in outdoor navigation.