 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscriminative and Efficient Label Propagation on Complementary Graphs for Multi-Object Tracking
Dec 01, 2015

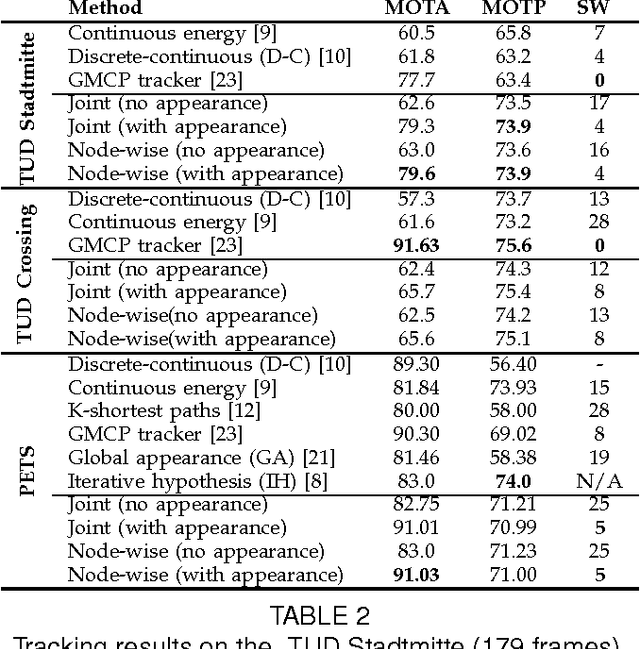

Given a set of detections, detected at each time instant independently, we investigate how to associate them across time. This is done by propagating labels on a set of graphs, each graph capturing how either the spatio-temporal or the appearance cues promote the assignment of identical or distinct labels to a pair of detections. The graph construction is motivated by a locally linear embedding of the detection features. Interestingly, the neighborhood of a node in appearance graph is defined to include all the nodes for which the appearance feature is available (even if they are temporally distant). This gives our framework the uncommon ability to exploit the appearance features that are available only sporadically. Once the graphs have been defined, multi-object tracking is formulated as the problem of finding a label assignment that is consistent with the constraints captured each graph, which results into a difference of convex (DC) program. We propose to decompose the global objective function into node-wise sub-problems. This not only allows a computationally efficient solution, but also supports an incremental and scalable construction of the graph, thereby making the framework applicable to large graphs and practical tracking scenarios. Moreover, it opens the possibility of parallel implementation.
Iterative hypothesis testing for multi-object tracking in presence of features with variable reliability
Sep 01, 2015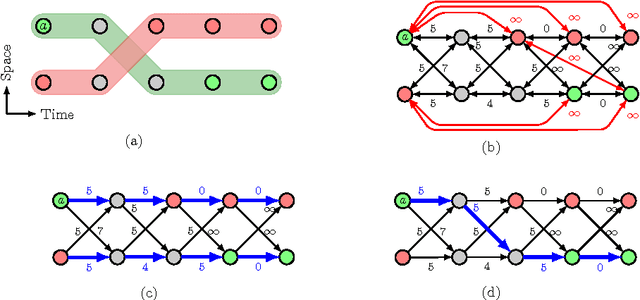
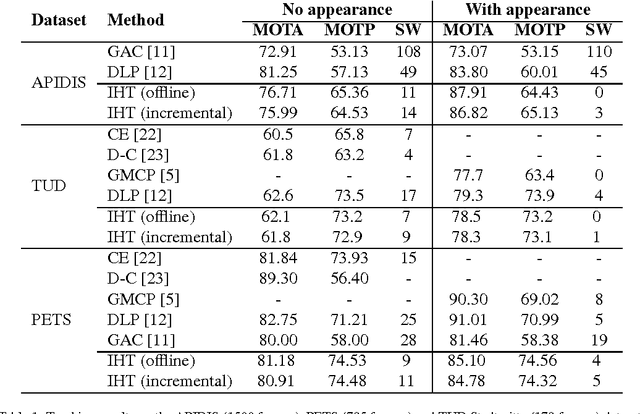
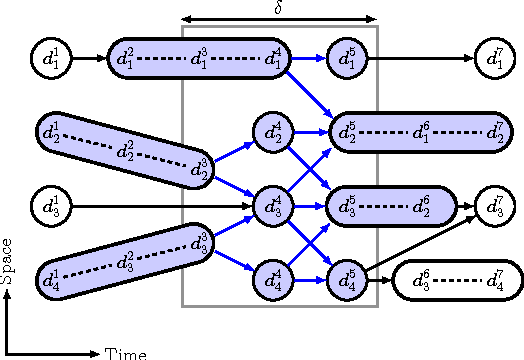
This paper assumes prior detections of multiple targets at each time instant, and uses a graph-based approach to connect those detections across time, based on their position and appearance estimates. In contrast to most earlier works in the field, our framework has been designed to exploit the appearance features, even when they are only sporadically available, or affected by a non-stationary noise, along the sequence of detections. This is done by implementing an iterative hypothesis testing strategy to progressively aggregate the detections into short trajectories, named tracklets. Specifically, each iteration considers a node, named key-node, and investigates how to link this key-node with other nodes in its neighborhood, under the assumption that the target appearance is defined by the key-node appearance estimate. This is done through shortest path computation in a temporal neighborhood of the key-node. The approach is conservative in that it only aggregates the shortest paths that are sufficiently better compared to alternative paths. It is also multi-scale in that the size of the investigated neighborhood is increased proportionally to the number of detections already aggregated into the key-node. The multi-scale nature of the process and the progressive relaxation of its conservativeness makes it both computationally efficient and effective. Experimental validations are performed extensively on a toy example, a 15 minutes long multi-view basketball dataset, and other monocular pedestrian datasets.