 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArc-Consistency computes the minimal binarised domains of an STP. Use of the result in a TCSP solver, in a TCSP-based job shop scheduler, and in generalising Dijkstra's one-to-all algorithm
Feb 22, 2020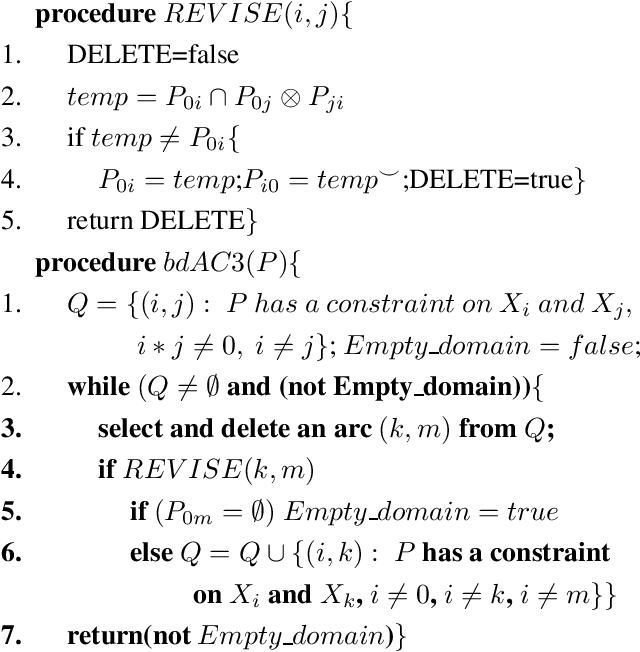

TCSPs (Temporal Constraint Satisfaction Problems), as defined in [Dechter et al., 1991], get rid of unary constraints by binarising them after having added an "origin of the world" variable. The constraints are therefore exclusively binary; additionally, a TCSP verifies the property that it is node-consistent and arc-consistent. Path-consistency, the next higher local consistency, solves the consistency problem of a convex TCSP, referred to in [Dechter et al., 1991] as an STP (Simple Temporal Problem); more than that, the output of path-consistency applied to an n+1-variable STP is a minimal and strongly n+1-consistent STP. Weaker versions of path-consistency, aimed at avoiding what is referred to in [Schwalb and Dechter, 1997] as the "fragmentation problem", are used as filtering procedures in recursive backtracking algorithms for the consistency problem of a general TCSP. In this work, we look at the constraints between the "origin of the world" variable and the other variables, as the (binarised) domains of these other variables. With this in mind, we define a notion of arc-consistency for TCSPs, which we will refer to as binarised-domains Arc-Consistency, or bdArc-Consistency for short. We provide an algorithm achieving bdArc-Consistency for a TCSP, which we will refer to as bdAC3, for it is an adaptation of Mackworth's [1977] well-known arc-consistency algorithm AC3. We show that bdArc-Consistency computes the minimal (binarised) domains of an STP. We then show how to use the result in a general TCSP solver, in a TCSP-based job shop scheduler, and in generalising the well-known Dijkstra's one-to-all shortest paths algorithm.
A spatio-temporalisation of ALC and its translation into alternating automata augmented with spatial constraints
Feb 22, 2020
The aim of this work is to provide a family of qualitative theories for spatial change in general, and for motion of spatial scenes in particular. To achieve this, we consider a spatio-temporalisation MTALC(Dx), of the well-known ALC(D) family of Description Logics (DLs) with a concrete domain: the MTALC(Dx) concepts are interpreted over infinite k-ary Sigma-trees, with the nodes standing for time points, and Sigma including, additionally to its uses in classical k-ary Sigma-trees, the description of the snapshot of an n-object spatial scene of interest; the roles split into m+n immediate-successor (accessibility) relations, which are serial, irreflexive and antisymmetric, and of which m are general, not necessarily functional, the other n functional; the concrete domain Dx is generated by an RCC8-like spatial Relation Algebra (RA) x, and is used to guide the change by imposing spatial constraints on objects of the "followed" spatial scene, eventually at different time points of the input trees. In order to capture the expressiveness of most modal temporal logics encountered in the literature, we introduce weakly cyclic Terminological Boxes (TBoxes) of MTALC(Dx), whose axioms capture the decreasing property of modal temporal operators. We show the important result that satisfiability of an MTALC(Dx) concept with respect to a weakly cyclic TBox can be reduced to the emptiness problem of a Buchi weak alternating automaton augmented with spatial constraints. In another work, complementary to this one, also submitted to this conference, we thoroughly investigate Buchi automata augmented with spatial constraints, and provide, in particular, a translation of an alternating into a nondeterministic, and an effective decision procedure for the emptiness problem of the latter.
Integrating cardinal direction relations and other orientation relations in Qualitative Spatial Reasoning
Oct 05, 2004
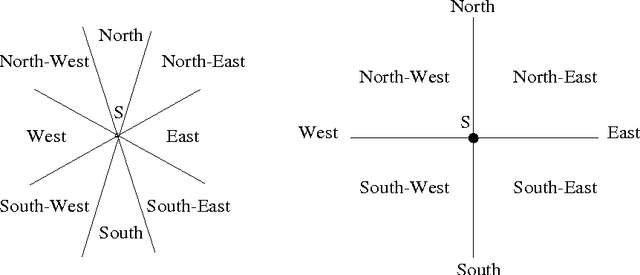

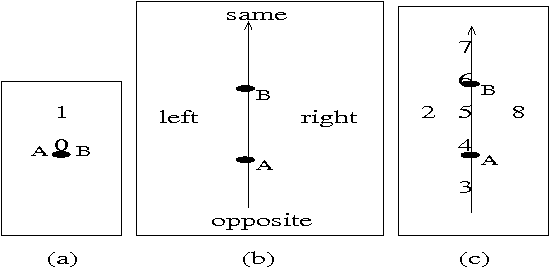
We propose a calculus integrating two calculi well-known in Qualitative Spatial Reasoning (QSR): Frank's projection-based cardinal direction calculus, and a coarser version of Freksa's relative orientation calculus. An original constraint propagation procedure is presented, which implements the interaction between the two integrated calculi. The importance of taking into account the interaction is shown with a real example providing an inconsistent knowledge base, whose inconsistency (a) cannot be detected by reasoning separately about each of the two components of the knowledge, just because, taken separately, each is consistent, but (b) is detected by the proposed algorithm, thanks to the interaction knowledge propagated from each of the two compnents to the other.
An ALC(D)-based combination of temporal constraints and spatial constraints suitable for continuous (spatial) change
Sep 24, 2004
We present a family of spatio-temporal theories suitable for continuous spatial change in general, and for continuous motion of spatial scenes in particular. The family is obtained by spatio-temporalising the well-known ALC(D) family of Description Logics (DLs) with a concrete domain D, as follows, where TCSPs denotes "Temporal Constraint Satisfaction Problems", a well-known constraint-based framework: (1) temporalisation of the roles, so that they consist of TCSP constraints (specifically, of an adaptation of TCSP constraints to interval variables); and (2) spatialisation of the concrete domain D: the concrete domain is now $D_x$, and is generated by a spatial Relation Algebra (RA) $x$, in the style of the Region-Connection Calculus RCC8. We assume durative truth (i.e., holding during a durative interval). We also assume the homogeneity property (if a truth holds during a given interval, it holds during all of its subintervals). Among other things, these assumptions raise the "conflicting" problem of overlapping truths, which the work solves with the use of a specific partition of the 13 atomic relations of Allen's interval algebra.
A TCSP-like decidable constraint language generalising existing cardinal direction relations
Sep 24, 2004


We define a quantitative constraint language subsuming two calculi well-known in QSR (Qualitative Spatial Reasoning): Frank's cone-shaped and projection-based calculi of cardinal direction relations. We show how to solve a CSP (Constraint Satisfaction Problem) expressed in the language.
Augmenting ALC roles and concrete domain with temporal roles and a spatial concrete domain -first results
Sep 24, 2004We consider the well-known family ALC(D) of description logics with a concrete domain, and provide first results on a framework obtained by augmenting ALC(D) atemporal roles and aspatial concrete domain with temporal roles and a spatial concrete domain.
Integrating existing cone-shaped and projection-based cardinal direction relations and a TCSP-like decidable generalisation
Nov 28, 2003

We consider the integration of existing cone-shaped and projection-based calculi of cardinal direction relations, well-known in QSR. The more general, integrating language we consider is based on convex constraints of the qualitative form $r(x,y)$, $r$ being a cone-shaped or projection-based cardinal direction atomic relation, or of the quantitative form $(\alpha ,\beta)(x,y)$, with $\alpha ,\beta\in [0,2\pi)$ and $(\beta -\alpha)\in [0,\pi ]$: the meaning of the quantitative constraint, in particular, is that point $x$ belongs to the (convex) cone-shaped area rooted at $y$, and bounded by angles $\alpha$ and $\beta$. The general form of a constraint is a disjunction of the form $[r_1\vee...\vee r_{n_1}\vee (\alpha_1,\beta_1)\vee...\vee (\alpha _{n_2},\beta_{n_2})](x,y)$, with $r_i(x,y)$, $i=1... n_1$, and $(\alpha _i,\beta_i)(x,y)$, $i=1... n_2$, being convex constraints as described above: the meaning of such a general constraint is that, for some $i=1... n_1$, $r_i(x,y)$ holds, or, for some $i=1... n_2$, $(\alpha_i,\beta_i)(x,y)$ holds. A conjunction of such general constraints is a $\tcsp$-like CSP, which we will refer to as an $\scsp$ (Spatial Constraint Satisfaction Problem). An effective solution search algorithm for an $\scsp$ will be described, which uses (1) constraint propagation, based on a composition operation to be defined, as the filtering method during the search, and (2) the Simplex algorithm, guaranteeing completeness, at the leaves of the search tree. The approach is particularly suited for large-scale high-level vision, such as, e.g., satellite-like surveillance of a geographic area.
A ternary Relation Algebra of directed lines
Jul 21, 2003



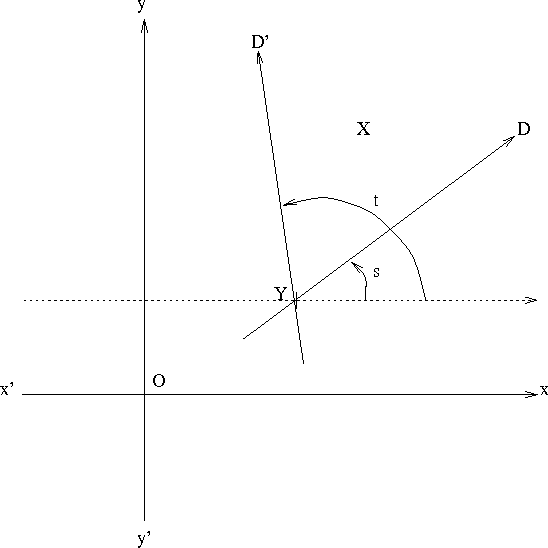
We define a ternary Relation Algebra (RA) of relative position relations on two-dimensional directed lines (d-lines for short). A d-line has two degrees of freedom (DFs): a rotational DF (RDF), and a translational DF (TDF). The representation of the RDF of a d-line will be handled by an RA of 2D orientations, CYC_t, known in the literature. A second algebra, TA_t, which will handle the TDF of a d-line, will be defined. The two algebras, CYC_t and TA_t, will constitute, respectively, the translational and the rotational components of the RA, PA_t, of relative position relations on d-lines: the PA_t atoms will consist of those pairs <t,r> of a TA_t atom and a CYC_t atom that are compatible. We present in detail the RA PA_t, with its converse table, its rotation table and its composition tables. We show that a (polynomial) constraint propagation algorithm, known in the literature, is complete for a subset of PA_t relations including almost all of the atomic relations. We will discuss the application scope of the RA, which includes incidence geometry, GIS (Geographic Information Systems), shape representation, localisation in (multi-)robot navigation, and the representation of motion prepositions in NLP (Natural Language Processing). We then compare the RA to existing ones, such as an algebra for reasoning about rectangles parallel to the axes of an (orthogonal) coordinate system, a ``spatial Odyssey'' of Allen's interval algebra, and an algebra for reasoning about 2D segments.
Bridging the gap between modal temporal logics and constraint-based QSR as an ALC(D) spatio-temporalisation with weakly cyclic TBoxes
Jul 17, 2003



The aim of this work is to provide a family of qualitative theories for spatial change in general, and for motion of spatial scenes in particular. To achieve this, we consider a spatio-temporalisation MTALC(D_x), of the well-known ALC(D) family of Description Logics (DLs) with a concrete domainan. In particular, the concrete domain D_x is generated by a qualitative spatial Relation Algebra (RA) x. We show the important result that satisfiability of an MTALC(D_x) concept with respect to a weakly cyclic TBox is decidable in nondeterministic exponential time, by reducing it to the emptiness problem of a weak alternating automaton augmented with spatial constraints, which we show to remain decidable, although the accepting condition of a run involves, additionally to the standard case, consistency of a CSP (Constraint Satisfaction Problem) potentially infinite. The result provides an effective tableaux-like satisfiability procedure which is discussed.