 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePSSF: Early osteoarthritis detection using physical synthetic knee X-ray scans and AI radiomics models
Jan 14, 2026Knee osteoarthritis (OA) is a major cause of disability worldwide and is still largely assessed using subjective radiographic grading, most commonly the Kellgren-Lawrence (KL) scale. Artificial intelligence (AI) and radiomics offer quantitative tools for OA assessment but depend on large, well-annotated image datasets, mainly X-ray scans, that are often difficult to obtain because of privacy, governance and resourcing constraints. In this research, we introduce a physics-based synthetic simulation framework (PSSF) to fully generate controllable X-ray scans without patients' involvement and violating their privacy and institutional constraints. This PSSF is a 2D X-ray projection simulator of anteroposterior knee radiographs from a parametric anatomical model of the distal femur and proximal tibia. Using PSSF, we create a virtual cohort of 180 subjects (260 knees), each is imaged under three protocols (reference, low-dose, and geometry-shift). Medial joint regions are automatically localized, preprocessed, and processed with the Image Biomarker Standardisation Initiative (IBSI). Practically, three machine learning (ML) models are utilized, logistic regression, random forest, and gradient boosting, to train binary (KL-like "0" vs. "2") and three-class (0-2) prediction radiographic images. Robustness is assessed within IBSI protocol, cross-protocol, and multi-protocol scenarios. Finally, features stability is then evaluated using intraclass correlation coefficients across acquisition changes.
IGAN: A New Inception-based Model for Stable and High-Fidelity Image Synthesis Using Generative Adversarial Networks
Jan 13, 2026Generative Adversarial Networks (GANs) face a significant challenge of striking an optimal balance between high-quality image generation and training stability. Recent techniques, such as DCGAN, BigGAN, and StyleGAN, improve visual fidelity; however, such techniques usually struggle with mode collapse and unstable gradients at high network depth. This paper proposes a novel GAN structural model that incorporates deeper inception-inspired convolution and dilated convolution. This novel model is termed the Inception Generative Adversarial Network (IGAN). The IGAN model generates high-quality synthetic images while maintaining training stability, by reducing mode collapse as well as preventing vanishing and exploding gradients. Our proposed IGAN model achieves the Frechet Inception Distance (FID) of 13.12 and 15.08 on the CUB-200 and ImageNet datasets, respectively, representing a 28-33% improvement in FID over the state-of-the-art GANs. Additionally, the IGAN model attains an Inception Score (IS) of 9.27 and 68.25, reflecting improved image diversity and generation quality. Finally, the two techniques of dropout and spectral normalization are utilized in both the generator and discriminator structures to further mitigate gradient explosion and overfitting. These findings confirm that the IGAN model potentially balances training stability with image generation quality, constituting a scalable and computationally efficient framework for high-fidelity image synthesis.
An IoT Real-Time Biometric Authentication System Based on ECG Fiducial Extracted Features Using Discrete Cosine Transform
Aug 28, 2017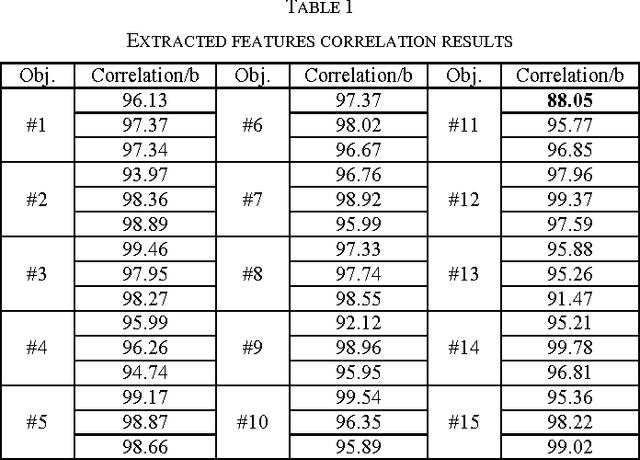
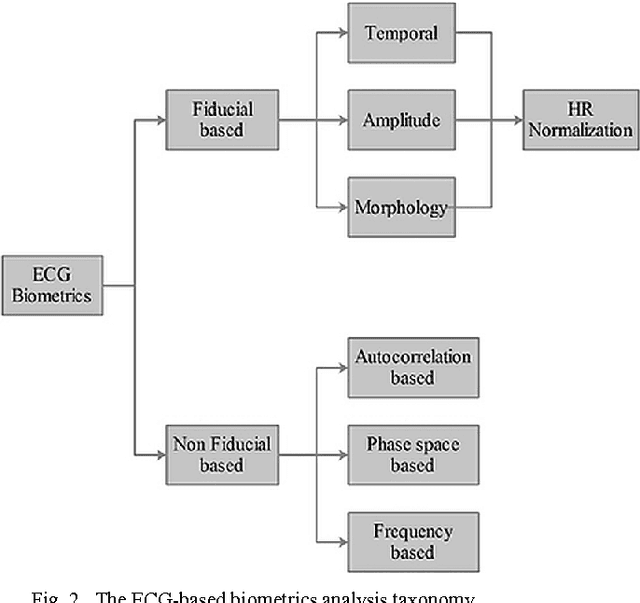
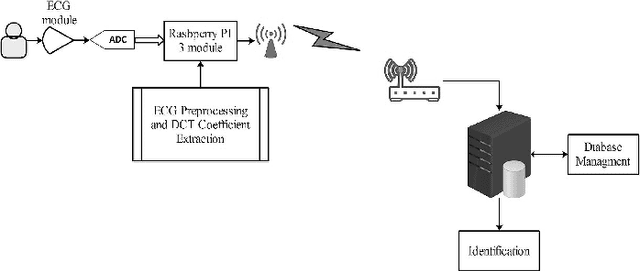
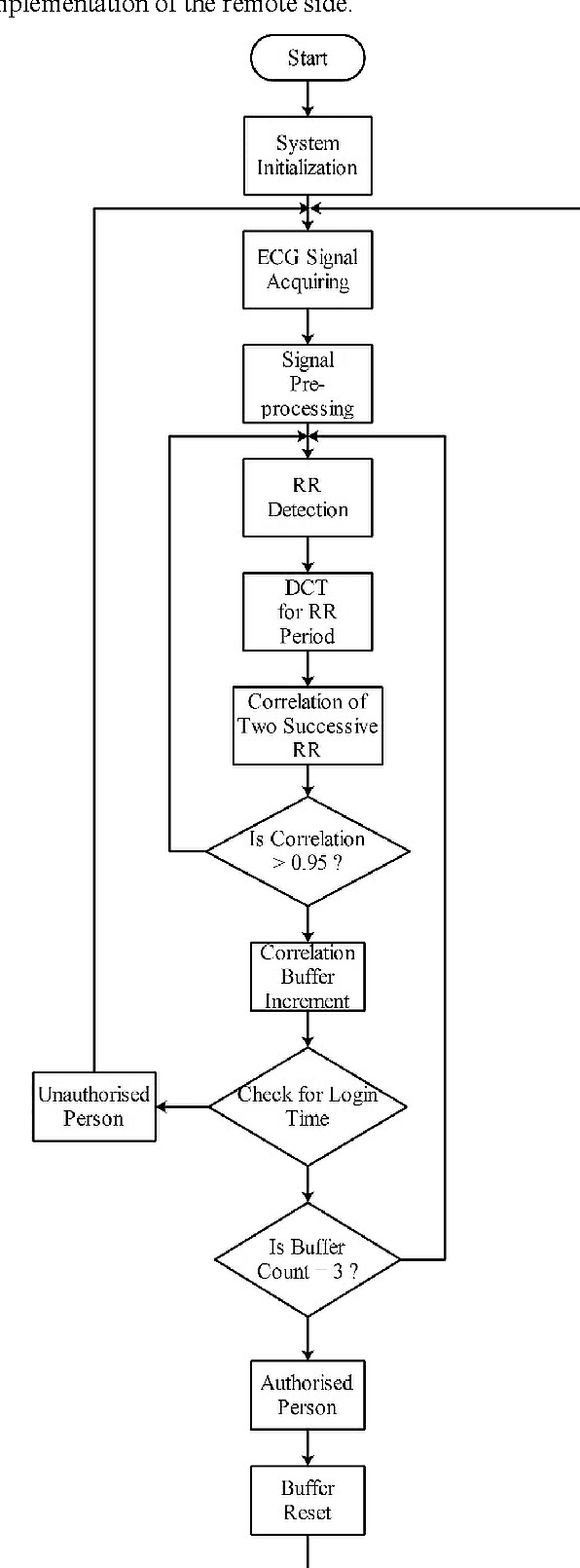
The conventional authentication technologies, like RFID tags and authentication cards/badges, suffer from different weaknesses, therefore a prompt replacement to use biometric method of authentication should be applied instead. Biometrics, such as fingerprints, voices, and ECG signals, are unique human characters that can be used for authentication processing. In this work, we present an IoT real-time authentication system based on using extracted ECG features to identify the unknown persons. The Discrete Cosine Transform (DCT) is used as an ECG feature extraction, where it has better characteristics for real-time system implementations. There are a substantial number of researches with a high accuracy of authentication, but most of them ignore the real-time capability of authenticating individuals. With the accuracy rate of 97.78% at around 1.21 seconds of processing time, the proposed system is more suitable for use in many applications that require fast and reliable authentication processing demands.
Software-Defined Robotics -- Idea & Approach
Aug 20, 2017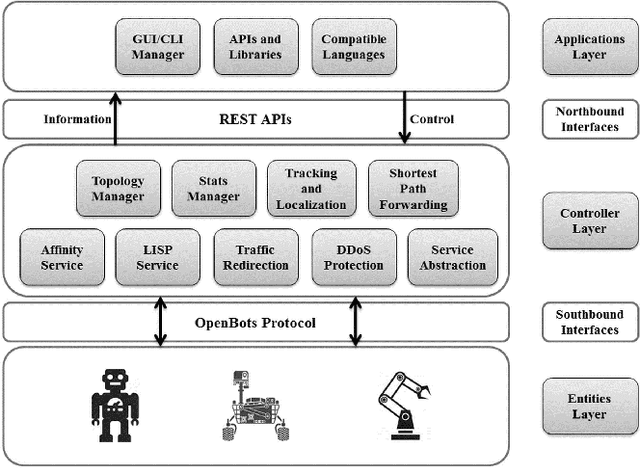
The methodology of Software-Defined Robotics hierarchical-based and stand-alone framework can be designed and implemented to program and control different sets of robots, regardless of their manufacturers' parameters and specifications, with unified commands and communications. This framework approach will increase the capability of (re)programming a specific group of robots during the runtime without affecting the others as desired in the critical missions and industrial operations, expand the shared bandwidth, enhance the reusability of code, leverage the computational processing power, decrease the unnecessary analyses of vast supplemental electrical components for each robot, as well as get advantages of the most state-of-the-art industrial trends in the cloud-based computing, Virtual Machines (VM), and Robot-as-a-Service (RaaS) technologies.