 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHard-Stop Synthesis for Multi-DOF Compliant Mechanisms
Jul 17, 2025Compliant mechanisms have significant potential in precision applications due to their ability to guide motion without contact. However, an inherent vulnerability to fatigue and mechanical failure has hindered the translation of compliant mechanisms to real-world applications. This is particularly challenging in service environments where loading is complex and uncertain, and the cost of failure is high. In such cases, mechanical hard stops are critical to prevent yielding and buckling. Conventional hard-stop designs, which rely on stacking single-DOF limits, must be overly restrictive in multi-DOF space to guarantee safety in the presence of unknown loads. In this study, we present a systematic design synthesis method to guarantee overload protection in compliant mechanisms by integrating coupled multi-DOF motion limits within a single pair of compact hard-stop surfaces. Specifically, we introduce a theoretical and practical framework for optimizing the contact surface geometry to maximize the mechanisms multi-DOF working space while still ensuring that the mechanism remains within its elastic regime. We apply this synthesis method to a case study of a caged-hinge mechanism for orthopaedic implants, and provide numerical and experimental validation that the derived design offers reliable protection against fatigue, yielding, and buckling. This work establishes a foundation for precision hard-stop design in compliant systems operating under uncertain loads, which is a crucial step toward enabling the application of compliant mechanisms in real-world systems.
Range of Motion Sensors for Monitoring Recovery of Total Knee Arthroplasty
Jul 01, 2022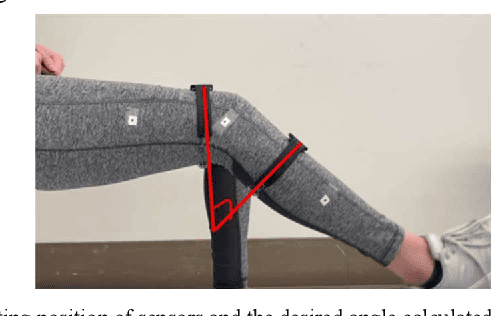
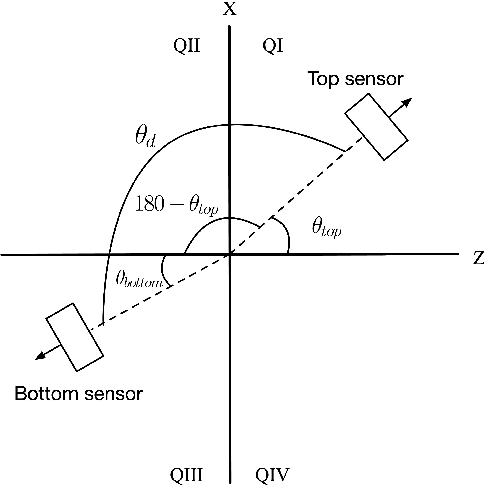
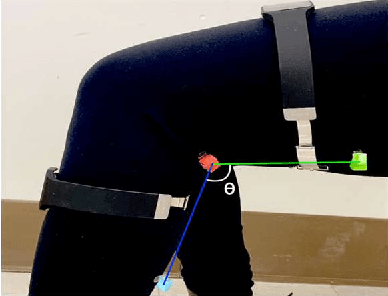
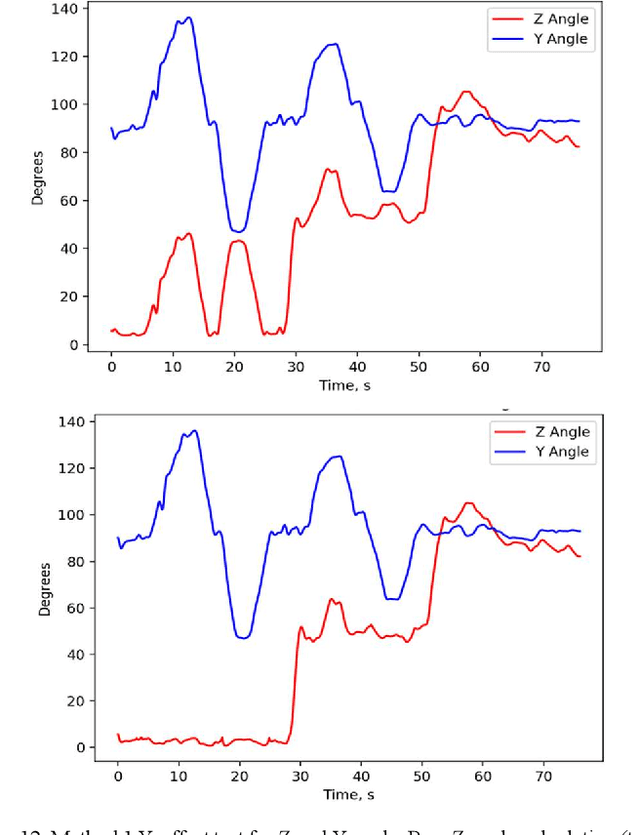
A low-cost, accurate device to measure and record knee range of motion (ROM) is of the essential need to improve confidence in at-home rehabilitation. It is to reduce hospital stay duration and overall medical cost after Total Knee Arthroplasty (TKA) procedures. The shift in Medicare funding from pay-as-you-go to the Bundled Payments for Care Improvement (BPCI) has created a push towards at-home care over extended hospital stays. It has heavily affected TKA patients, who typically undergo physical therapy at the clinic after the procedure to ensure full recovery of ROM. In this paper, we use accelerometers to create a ROM sensor that can be integrated into the post-operative surgical dressing, so that the cost of the sensors can be included in the bundled payments. In this paper, we demonstrate the efficacy of our method in comparison to the baseline computer vision method. Our results suggest that calculating angular displacement from accelerometer sensors demonstrates accurate ROM recordings under both stationary and walking conditions. The device would keep track of angle measurements and alert the patient when certain angle thresholds have been crossed, allowing patients to recover safely at home instead of going to multiple physical therapy sessions. The affordability of our sensor makes it more accessible to patients in need.