 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergent Self-Attention from Astrocyte-Gated Associative Memory Dynamics
Apr 28, 2026We introduce a Hopfield-type associative memory in which effective connectivity is multiplicatively modulated by astrocytic gains evolving under an entropy-regularized replicator equation. The coupled neuron-astrocyte dynamics admit a Lyapunov function, ensuring global convergence. At fixed points, astrocytic gains implement a softmax-normalized allocation over pattern similarity scores, yielding a mechanistic realization of self-attention as emergent routing on the gain simplex. In regimes of high memory load and interference, the model significantly improves retrieval accuracy relative to classical Hopfield dynamics and recent neuron-astrocyte baselines. These results establish a dynamical systems framework linking glial modulation, competitive resource allocation, and attention-like computation.
Explainable, automated urban interventions to improve pedestrian and vehicle safety
Nov 08, 2021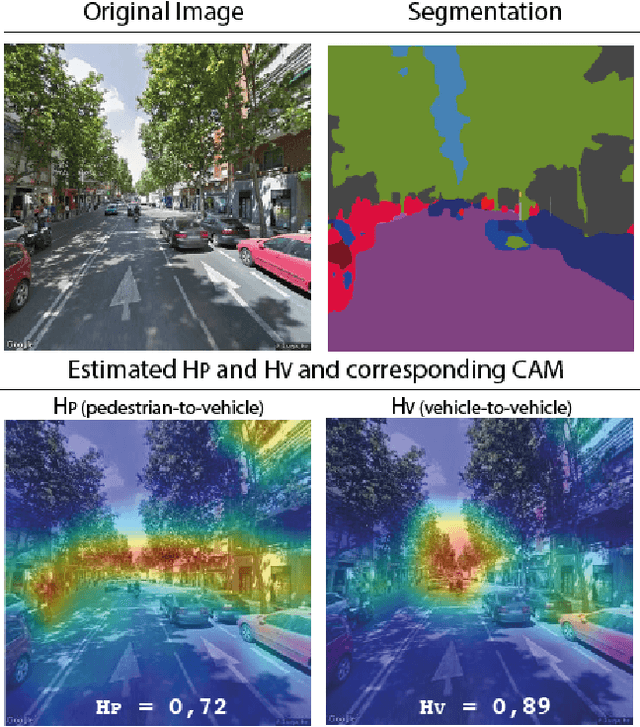
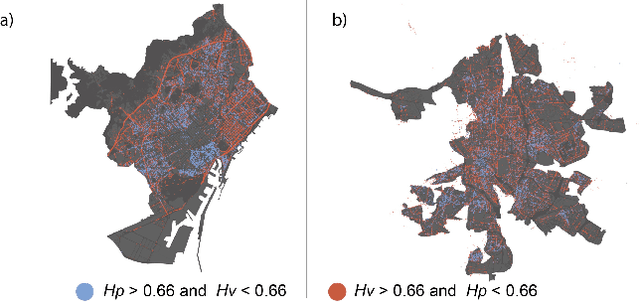
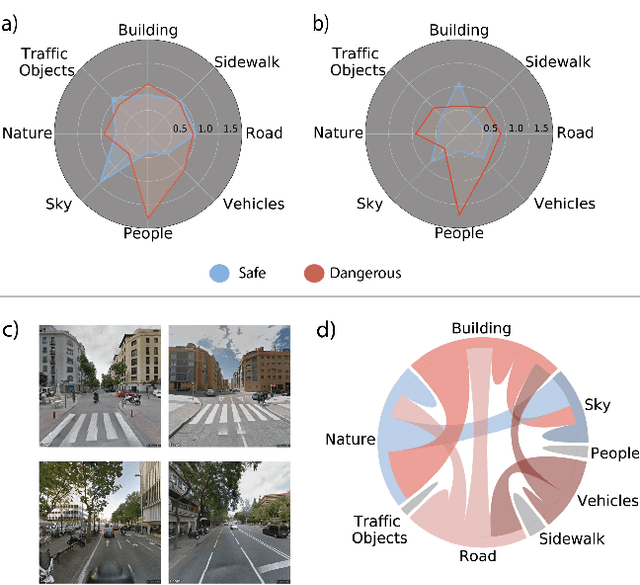
At the moment, urban mobility research and governmental initiatives are mostly focused on motor-related issues, e.g. the problems of congestion and pollution. And yet, we can not disregard the most vulnerable elements in the urban landscape: pedestrians, exposed to higher risks than other road users. Indeed, safe, accessible, and sustainable transport systems in cities are a core target of the UN's 2030 Agenda. Thus, there is an opportunity to apply advanced computational tools to the problem of traffic safety, in regards especially to pedestrians, who have been often overlooked in the past. This paper combines public data sources, large-scale street imagery and computer vision techniques to approach pedestrian and vehicle safety with an automated, relatively simple, and universally-applicable data-processing scheme. The steps involved in this pipeline include the adaptation and training of a Residual Convolutional Neural Network to determine a hazard index for each given urban scene, as well as an interpretability analysis based on image segmentation and class activation mapping on those same images. Combined, the outcome of this computational approach is a fine-grained map of hazard levels across a city, and an heuristic to identify interventions that might simultaneously improve pedestrian and vehicle safety. The proposed framework should be taken as a complement to the work of urban planners and public authorities.