 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage models recognize dropout and Gaussian noise applied to their activations
Apr 19, 2026We provide evidence that language models can detect, localize and, to a certain degree, verbalize the difference between perturbations applied to their activations. More precisely, we either (a) \emph{mask} activations, simulating \emph{dropout}, or (b) add \emph{Gaussian noise} to them, at a target sentence. We then ask a multiple-choice question such as ``\emph{Which of the previous sentences was perturbed?}'' or ``\emph{Which of the two perturbations was applied?}''. We test models from the Llama, Olmo, and Qwen families, with sizes between 8B and 32B, all of which can easily detect and localize the perturbations, often with perfect accuracy. These models can also learn, when taught in context, to distinguish between dropout and Gaussian noise. Notably, \qwenb's \emph{zero-shot} accuracy in identifying which perturbation was applied improves as a function of the perturbation strength and, moreover, decreases if the in-context labels are flipped, suggesting a prior for the correct ones -- even modulo controls. Because dropout has been used as a training-regularization technique, while Gaussian noise is sometimes added during inference, we discuss the possibility of a data-agnostic ``training awareness'' signal and the implications for AI safety. The code and data are available at \href{https://github.com/saifh-github/llm-dropout-noise-recognition}{link 1} and \href{https://drive.google.com/file/d/1es-Sfw_AH9GficeXgeqpy87rocrZZ_PQ/view}{link 2}, respectively.
Reinforcement Learning for Decision-Level Interception Prioritization in Drone Swarm Defense
Aug 01, 2025



The growing threat of low-cost kamikaze drone swarms poses a critical challenge to modern defense systems demanding rapid and strategic decision-making to prioritize interceptions across multiple effectors and high-value target zones. In this work, we present a case study demonstrating the practical advantages of reinforcement learning in addressing this challenge. We introduce a high-fidelity simulation environment that captures realistic operational constraints, within which a decision-level reinforcement learning agent learns to coordinate multiple effectors for optimal interception prioritization. Operating in a discrete action space, the agent selects which drone to engage per effector based on observed state features such as positions, classes, and effector status. We evaluate the learned policy against a handcrafted rule-based baseline across hundreds of simulated attack scenarios. The reinforcement learning based policy consistently achieves lower average damage and higher defensive efficiency in protecting critical zones. This case study highlights the potential of reinforcement learning as a strategic layer within defense architectures, enhancing resilience without displacing existing control systems. All code and simulation assets are publicly released for full reproducibility, and a video demonstration illustrates the policy's qualitative behavior.
Deep Learning Computer Vision Algorithms for Real-time UAVs On-board Camera Image Processing
Nov 02, 2022This paper describes how advanced deep learning based computer vision algorithms are applied to enable real-time on-board sensor processing for small UAVs. Four use cases are considered: target detection, classification and localization, road segmentation for autonomous navigation in GNSS-denied zones, human body segmentation, and human action recognition. All algorithms have been developed using state-of-the-art image processing methods based on deep neural networks. Acquisition campaigns have been carried out to collect custom datasets reflecting typical operational scenarios, where the peculiar point of view of a multi-rotor UAV is replicated. Algorithms architectures and trained models performances are reported, showing high levels of both accuracy and inference speed. Output examples and on-field videos are presented, demonstrating models operation when deployed on a GPU-powered commercial embedded device (NVIDIA Jetson Xavier) mounted on board of a custom quad-rotor, paving the way to enabling high level autonomy.
DIAMBRA Arena: a New Reinforcement Learning Platform for Research and Experimentation
Oct 19, 2022
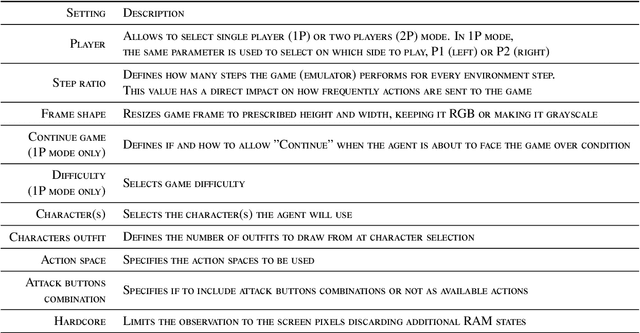

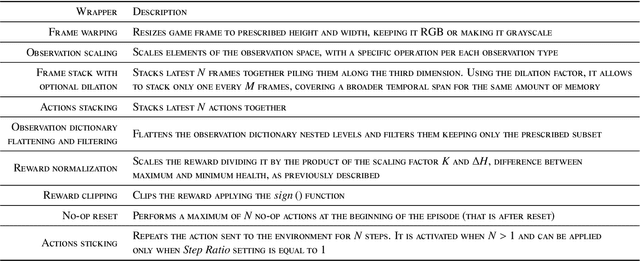
The recent advances in reinforcement learning have led to effective methods able to obtain above human-level performances in very complex environments. However, once solved, these environments become less valuable, and new challenges with different or more complex scenarios are needed to support research advances. This work presents DIAMBRA Arena, a new platform for reinforcement learning research and experimentation, featuring a collection of high-quality environments exposing a Python API fully compliant with OpenAI Gym standard. They are episodic tasks with discrete actions and observations composed by raw pixels plus additional numerical values, all supporting both single player and two players mode, allowing to work on standard reinforcement learning, competitive multi-agent, human-agent competition, self-play, human-in-the-loop training and imitation learning. Software capabilities are demonstrated by successfully training multiple deep reinforcement learning agents with proximal policy optimization obtaining human-like behavior. Results confirm the utility of DIAMBRA Arena as a reinforcement learning research tool, providing environments designed to study some of the most challenging topics in the field.