 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Adaptive Non-Intrusive Reduced-Order Models: Design and Challenges
Feb 11, 2026Projection-based Reduced Order Models (ROMs) are often deployed as static surrogates, which limits their practical utility once a system leaves the training manifold. We formalize and study adaptive non-intrusive ROMs that update both the latent subspace and the reduced dynamics online. Building on ideas from static non-intrusive ROMs, specifically, Operator Inference (OpInf) and the recently-introduced Non-intrusive Trajectory-based optimization of Reduced-Order Models (NiTROM), we propose three formulations: Adaptive OpInf (sequential basis/operator refits), Adaptive NiTROM (joint Riemannian optimization of encoder/decoder and polynomial dynamics), and a hybrid that initializes NiTROM with an OpInf update. We describe the online data window, adaptation window, and computational budget, and analyze cost scaling. On a transiently perturbed lid-driven cavity flow, static Galerkin/OpInf/NiTROM drift or destabilize when forecasting beyond training. In contrast, Adaptive OpInf robustly suppresses amplitude drift with modest cost; Adaptive NiTROM is shown to attain near-exact energy tracking under frequent updates but is sensitive to its initialization and optimization depth; the hybrid is most reliable under regime changes and minimal offline data, yielding physically coherent fields and bounded energy. We argue that predictive claims for ROMs must be cost-aware and transparent, with clear separation of training/adaptation/deployment regimes and explicit reporting of online budgets and full-order model queries. This work provides a practical template for building self-correcting, non-intrusive ROMs that remain effective as the dynamics evolve well beyond the initial manifold.
Model Reduction for Nonlinear Systems by Balanced Truncation of State and Gradient Covariance
Aug 03, 2022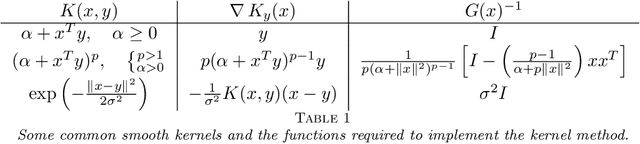
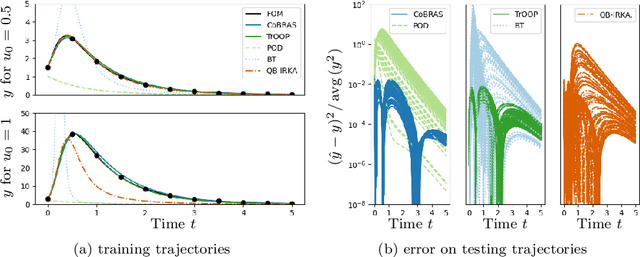
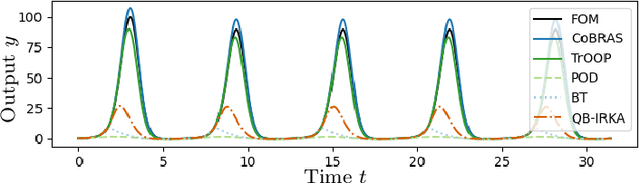
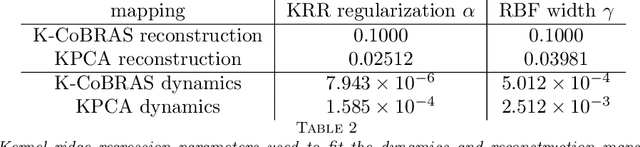
Data-driven reduced-order models often fail to make accurate forecasts of high-dimensional nonlinear systems that are sensitive along coordinates with low-variance because such coordinates are often truncated, e.g., by proper orthogonal decomposition, kernel principal component analysis, and autoencoders. Such systems are encountered frequently in shear-dominated fluid flows where non-normality plays a significant role in the growth of disturbances. In order to address these issues, we employ ideas from active subspaces to find low-dimensional systems of coordinates for model reduction that balance adjoint-based information about the system's sensitivity with the variance of states along trajectories. The resulting method, which we refer to as covariance balancing reduction using adjoint snapshots (CoBRAS), is analogous to balanced truncation with state and adjoint-based gradient covariance matrices replacing the system Gramians and obeying the same key transformation laws. Here, the extracted coordinates are associated with an oblique projection that can be used to construct Petrov-Galerkin reduced-order models. We provide an efficient snapshot-based computational method analogous to balanced proper orthogonal decomposition. This also leads to the observation that the reduced coordinates can be computed relying on inner products of state and gradient samples alone, allowing us to find rich nonlinear coordinates by replacing the inner product with a kernel function. In these coordinates, reduced-order models can be learned using regression. We demonstrate these techniques and compare to a variety of other methods on a simple, yet challenging three-dimensional system and an axisymmetric jet flow simulation with $10^5$ state variables.