 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFRAC-Q-Learning: A Reinforcement Learning with Boredom Avoidance Processes for Social Robots
Dec 07, 2023The reinforcement learning algorithms have often been applied to social robots. However, most reinforcement learning algorithms were not optimized for the use of social robots, and consequently they may bore users. We proposed a new reinforcement learning method specialized for the social robot, the FRAC-Q-learning, that can avoid user boredom. The proposed algorithm consists of a forgetting process in addition to randomizing and categorizing processes. This study evaluated interest and boredom hardness scores of the FRAC-Q-learning by a comparison with the traditional Q-learning. The FRAC-Q-learning showed significantly higher trend of interest score, and indicated significantly harder to bore users compared to the traditional Q-learning. Therefore, the FRAC-Q-learning can contribute to develop a social robot that will not bore users. The proposed algorithm can also find applications in Web-based communication and educational systems. This paper presents the entire process, detailed implementation and a detailed evaluation method of the of the FRAC-Q-learning for the first time.
Landmark Map: An Extension of the Self-Organizing Map for a User-Intended Nonlinear Projection
Aug 20, 2019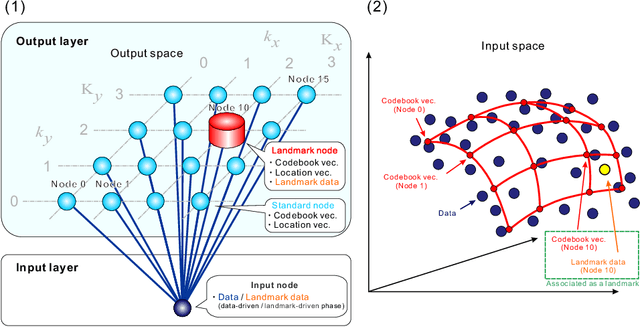
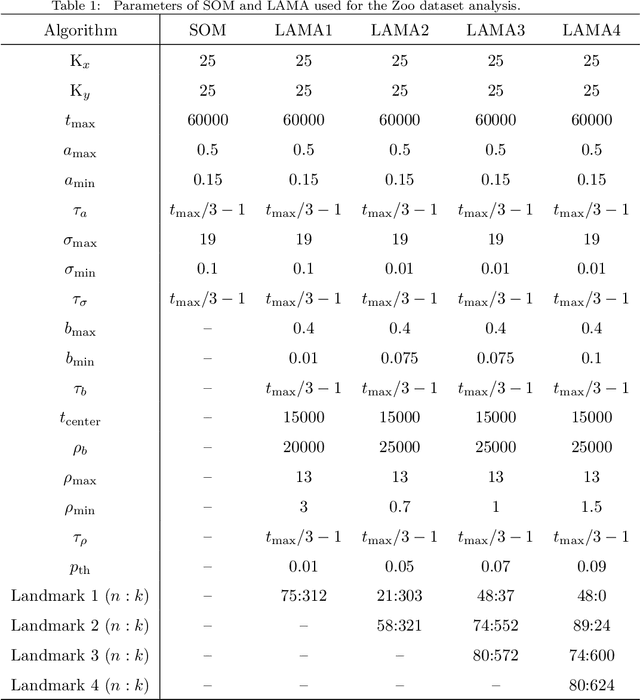
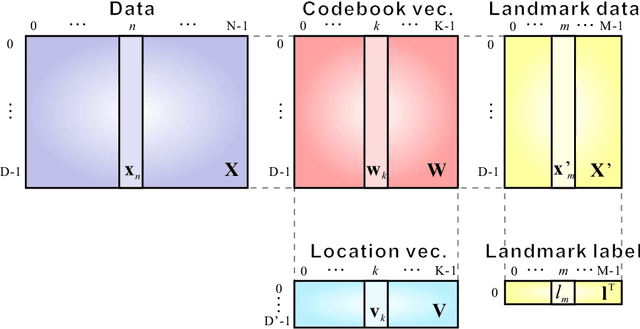
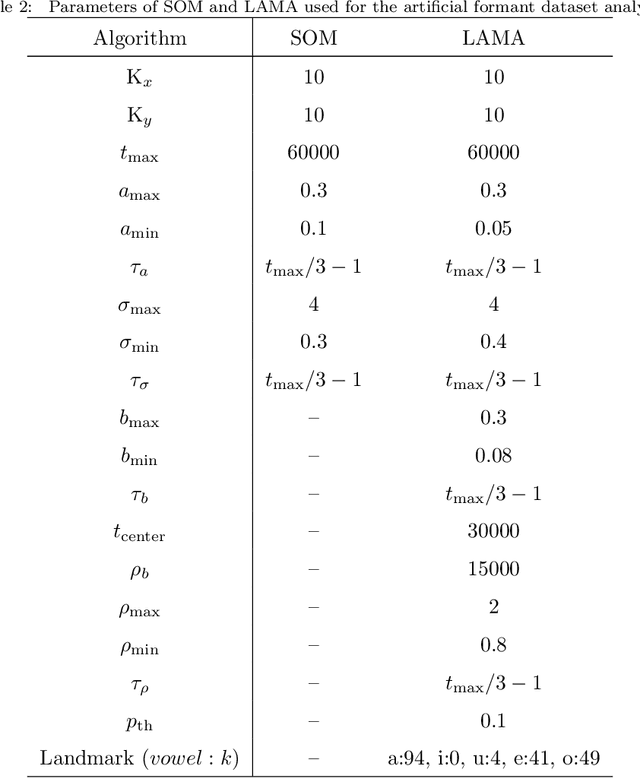
The self-organizing map (SOM) is an unsupervised artificial neural network that is widely used in, e.g., data mining and visualization. Supervised and semi-supervised learning methods have been proposed for the SOM. However, their teacher labels do not describe the relationship between the data and the location of nodes. This study proposes a landmark map (LAMA), which is an extension of the SOM that utilizes several landmarks, e.g., pairs of nodes and data points. LAMA is designed to obtain a user-intended nonlinear projection to achieve, e.g., the landmark-oriented data visualization. To reveal the learning properties of LAMA, the Zoo dataset from the UCI Machine Learning Repository and an artificial formant dataset were analyzed. The analysis results of the Zoo dataset indicated that LAMA could provide a new data view such as the landmark-centered data visualization. Furthermore, the artificial formant data analysis revealed that LAMA successfully provided the intended nonlinear projection associating articular movement with vertical and horizontal movement of a computer cursor. Potential applications of LAMA include data mining, recommendation systems, and human-computer interaction.