 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechanical Characterization of Compliant Cellular Robots. Part II: Active Strain
Mar 11, 2022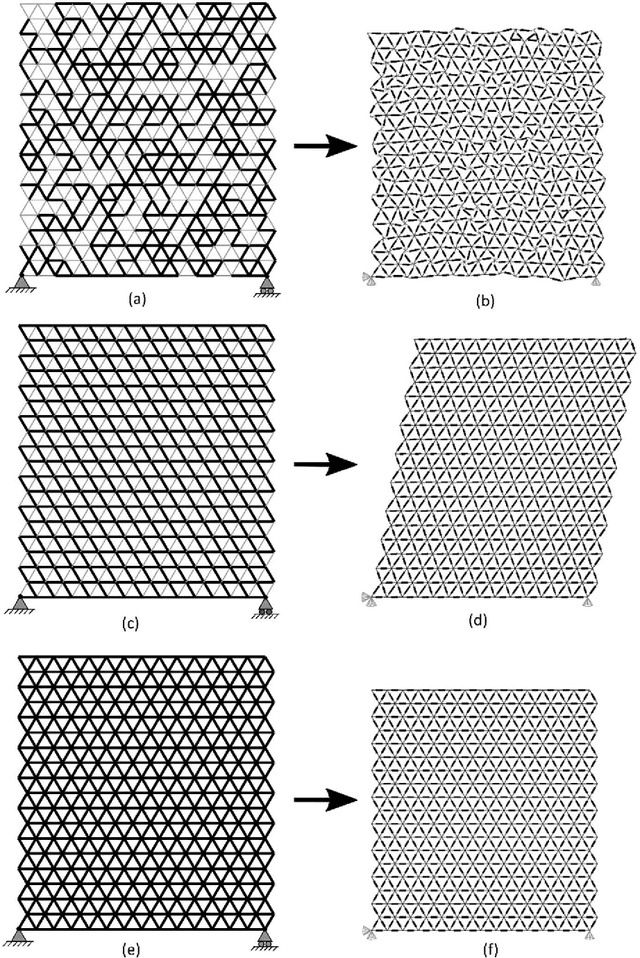
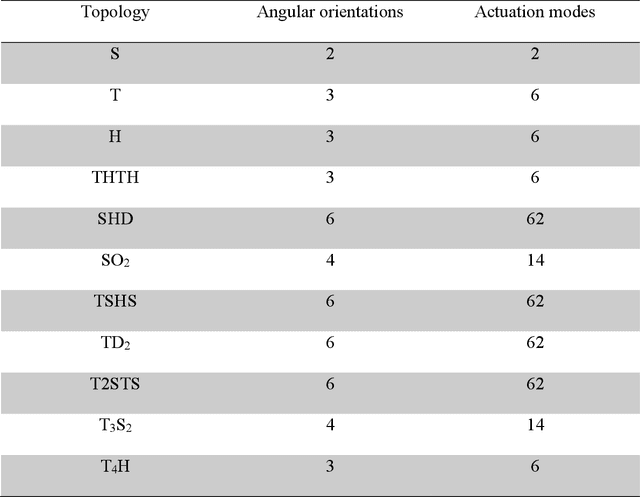
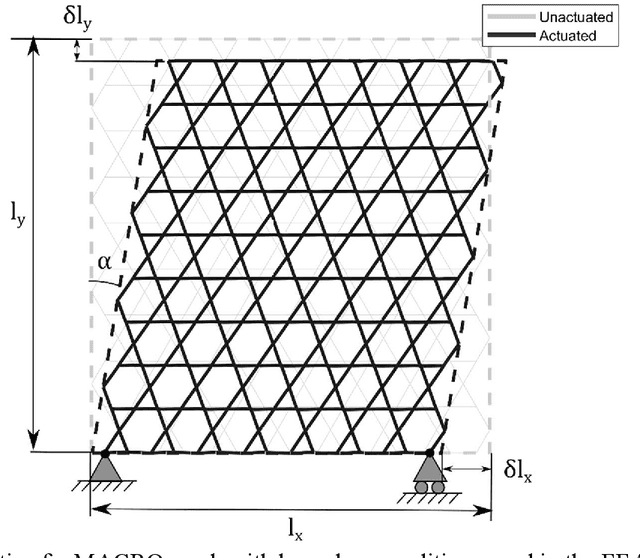
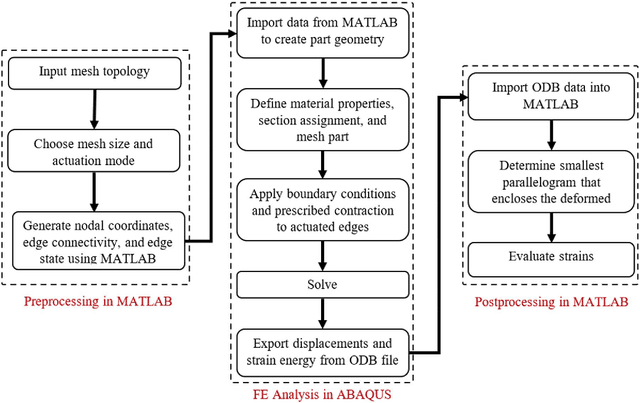
Modular Active Cell Robots (MACROs) is a design approach in which a large number of linear actuators and passive compliant joints are assembled to create an active structure with a repeating unit cell. Such a mesh-like robotic structure can be actuated to achieve large deformation and shape-change. In this two-part paper, we use Finite Element Analysis (FEA) to model the deformation behavior of different MACRO mesh topologies and evaluate their passive and active mechanical characteristics. In part 1, we presented the passive stiffness characteristics of different MACRO meshes. Now, in this part 2 of the paper, we investigate the active strain characteristics of planar MACRO meshes. Using FEA, we quantify and compare the strains generated for the specific choice of MACRO mesh topology and further for the specific choice of actuators actuated in that particular mesh. We simulate a series of actuation modes that are based on the angular orientation of the actuators within the mesh and show that such actuation modes result in deformation that is independent of the size of the mesh. We also show that there exists a subset of such actuation modes that spans the range of deformation behavior. Finally, we compare the actuation effort required to actuate different MACRO meshes and show that the actuation effort is related to the nodal connectivity of the mesh.
Mechanical Characterization of Compliant Cellular Robots. Part I: Passive Stiffness
Mar 11, 2022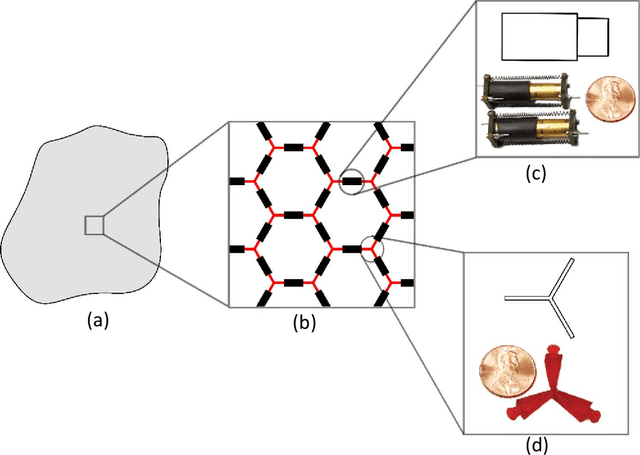
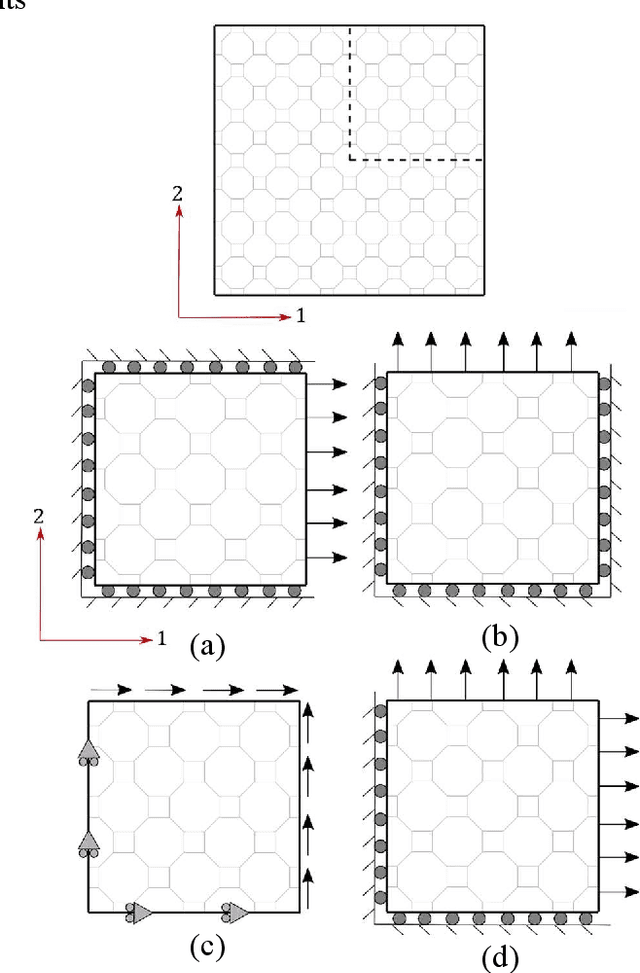
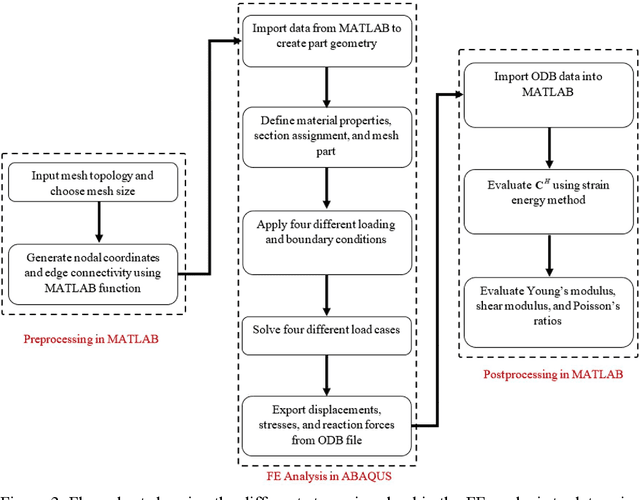
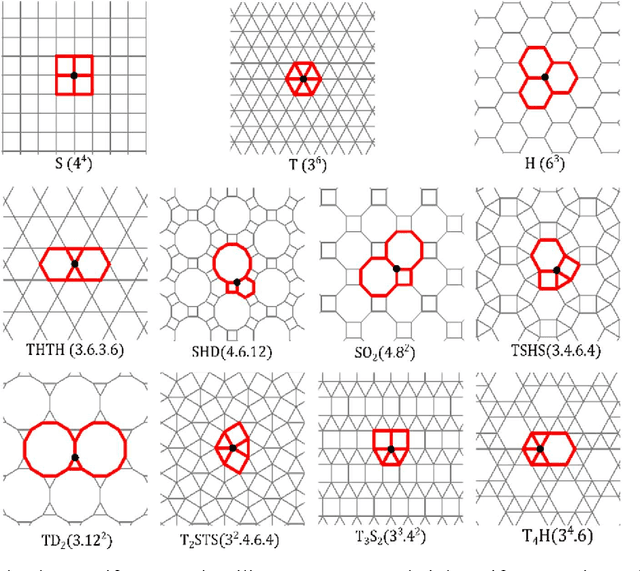
Modular Active Cell Robots (MACROs) are a design paradigm for modular robotic hardware that uses only two components, namely actuators and passive compliant joints. Under the MACRO approach, a large number of actuators and joints are connected to create mesh-like cellular robotic structures that can be actuated to achieve large deformation and shape-change. In this two-part paper, we study the importance of different possible mesh topologies within the MACRO framework. Regular and semi-regular tilings of the plane are used as the candidate mesh topologies and simulated using Finite Element Analysis (FEA). In Part 1, we use FEA to evaluate their passive stiffness characteristics. Using a strain energy method, the homogenized material properties (Young's modulus, shear modulus, and Poisson's ratio) of different mesh topologies are computed and compared. The results show that the stiffnesses increase with increasing nodal connectivity and that stretching-dominated topologies have higher stiffness compared to bending-dominated ones. We also investigate the role of relative actuator-node stiffness on the overall mesh characteristics. This analysis shows that the stiffness of stretching-dominated topologies scale directly with their cross-section area whereas the bending-dominated ones do not have such a direct relationship.