 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensor-based, time-critical mobility of autonomous robots in cluttered spaces: a harmonic potential approach
Aug 26, 2018This paper suggests an integrated navigation system for an unmanned ground vehicle operating in an unknown cluttered environment. The navigator supports time-critical mobility making it possible for a mobile robot to reach a target from the first attempt without the need for a dedicated exploration and mapping stage. The robot only uses necessary and sufficient egocentric local sensory data collected on its way to the target. The construction of the navigation structure revolves around key properties of the harmonic potential field approach to motion planning. The robots trajectory is well-behaved and direct-to-the-goal. It contains only the minimum number of detours necessary to accommodate the sensory data and maintain the robot in a safe, goal-oriented state. The navigation structure is developed and its theoretical basis is explained. Extensive experimental validation of its properties and performance is carried-out using the X80 robotic platform
* 32 pages, 56 figures, Journal paper
A Delay-Tolerant Potential-Field-Based Network Implementation of an Integrated Navigation System
Aug 23, 2016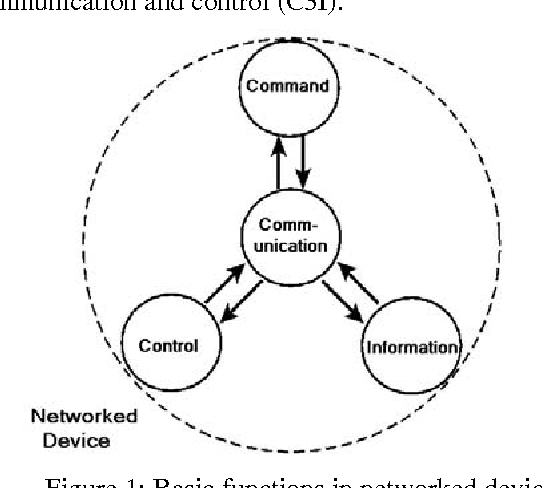
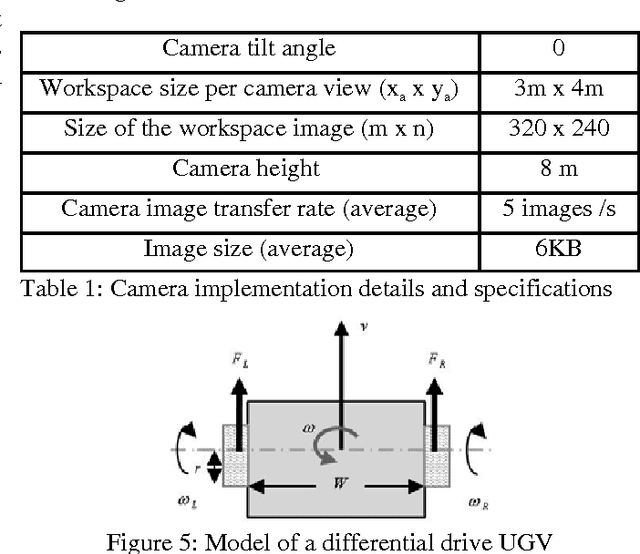
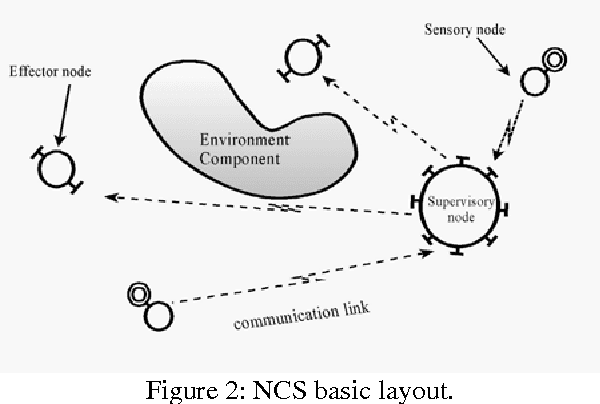
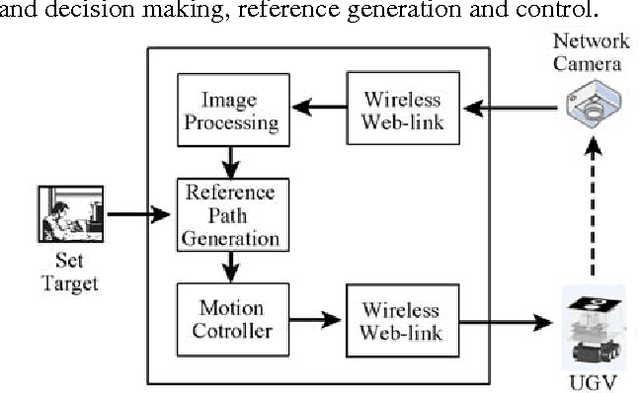
Network controllers (NCs) are devices that are capable of converting dynamic, spatially extended, and functionally specialized modules into a taskable goal-oriented group called networked control system. This paper examines the practical aspects of designing and building an NC that uses the Internet as a communication medium. It focuses on finding compatible controller components that can be integrated via a host structure in a manner that makes it possible to network, in real-time, a webcam, an unmanned ground vehicle (UGV), and a remote computer server along with the necessary operator software interface. The aim is to deskill the UGV navigation process and yet maintain a robust performance. The structure of the suggested controller, its components, and the manner in which they are interfaced are described. Thorough experimental results along with performance assessment and comparisons to a previously implemented NC are provided.
A Harmonic Potential Field Approach for Joint Planning & Control of a Rigid, Separable Nonholonomic, Mobile Robot
Aug 23, 2016The main objective of this paper is to provide a tool for performing path planning at the servo level of a mobile robot. The ability to perform, in a provably correct manner, such a complex task at the servo level can lead to a large increase in the speed of operation, low energy consumption and high quality of response. Planning has been traditionally limited to the high level controller of a robot. The guidance velocity signal from this stage is usually converted to a control signal using what is known as an electronic speed controller (ESC). This paper demonstrates the ability of the harmonic potential field (HPF) approach to generate a provably correct, constrained, well behaved trajectory and control signal for a rigid, nonholonomic robot in a stationary, cluttered environment. It is shown that the HPF based, servo level planner can address a large number of challenges facing planning in a realistic situation. The suggested approach migrates the rich and provably correct properties of the solution trajectories from an HPF planner to those of the robot. This is achieved using a synchronizing control signal whose aim is to align the velocity of the robot in its local coordinates, with that of the gradient of the HPF. The link between the two is made possible by representing the robot using what the paper terms separable form. The context-sensitive and goal-oriented control signal used to steer the robot is demonstrated to be well behaved and robust in the presence of actuator noise, saturation and uncertainty in the parameters. The approach is developed, proofs of correctness are provided and the capabilities of the scheme are demonstrated using simulation results.
Planning With Discrete Harmonic Potential Fields
Aug 21, 2016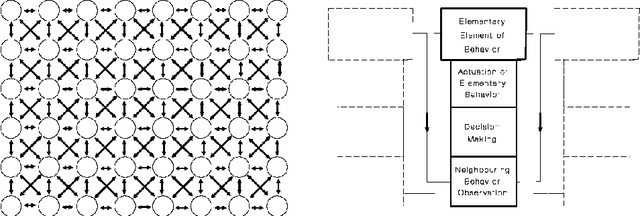
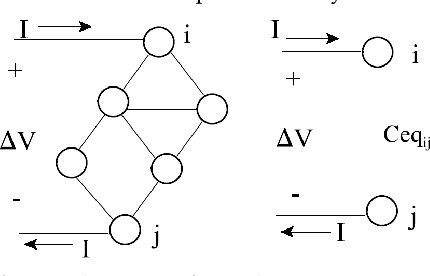
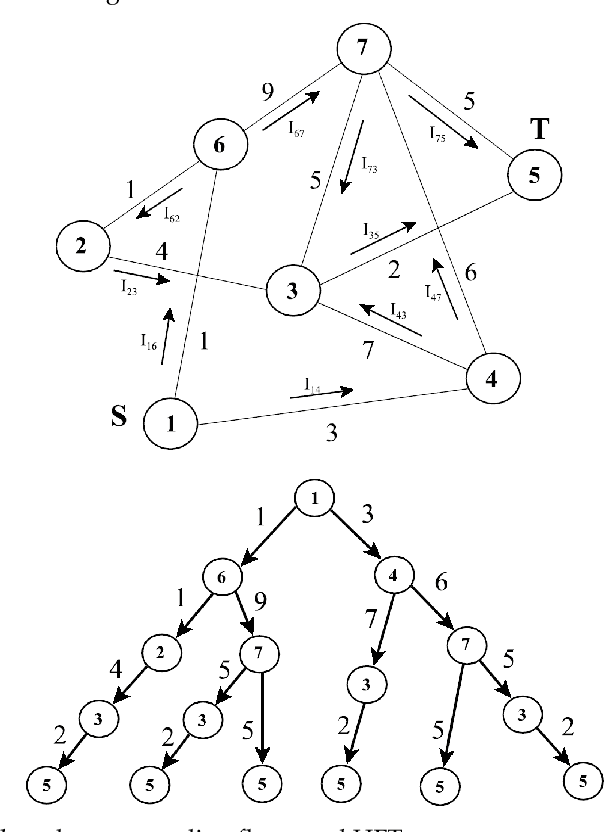
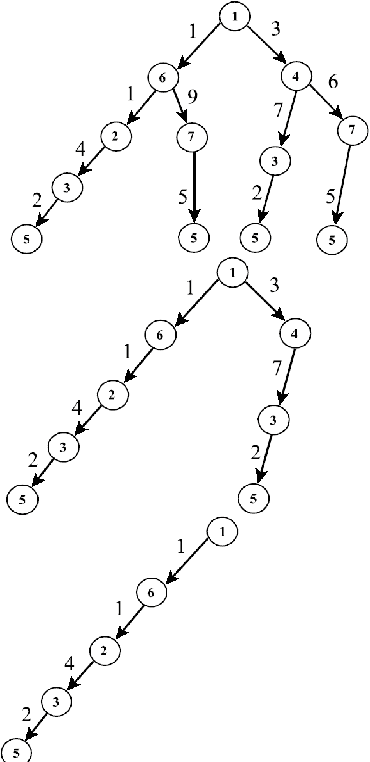
In this work a discrete counterpart to the continuous harmonic potential field approach is suggested. The extension to the discrete case makes use of the strong relation HPF-based planning has to connectionist artificial intelligence (AI). Connectionist AI systems are networks of simple, interconnected processors running in parallel within the confines of the environment in which the planning action is to be synthesized. It is not hard to see that such a paradigm naturally lends itself to planning on weighted graphs where the processors may be seen as the vertices of the graph and the relations among them as its edges. Electrical networks are an effective realization of connectionist AI. The utility of the discrete HPF (DHPF) approach is demonstrated in three ways. First, the capability of the DHPF approach to generate new, abstract, planning techniques is demonstrated by constructing a novel, efficient, optimal, discrete planning method called the M* algorithm. Also, its ability to augment the capabilities of existing planners is demonstrated by suggesting a generic solution to the lower bound problem faced by the A* algorithm. The DHPF approach is shown to be useful in solving specific planning problems in communication. It is demonstrated that the discrete HPF paradigm can support routing on-the-fly while the network is still in a transient state. It is shown by simulation that if a path to the target always exist and the switching delays in the routers are negligible, a packet will reach its destination despite the changes in the network which may simultaneously take place while the packet is being routed.
Managing The Dynamics Of A Harmonic Potential Field-Guided Robot In A Cluttered Environment
Aug 21, 2016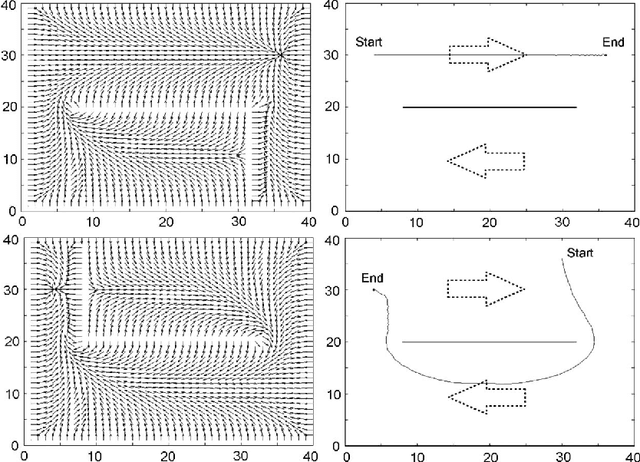
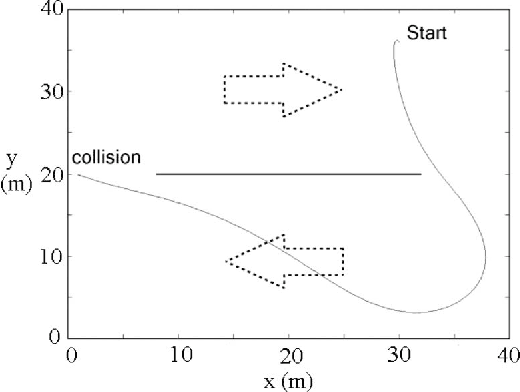
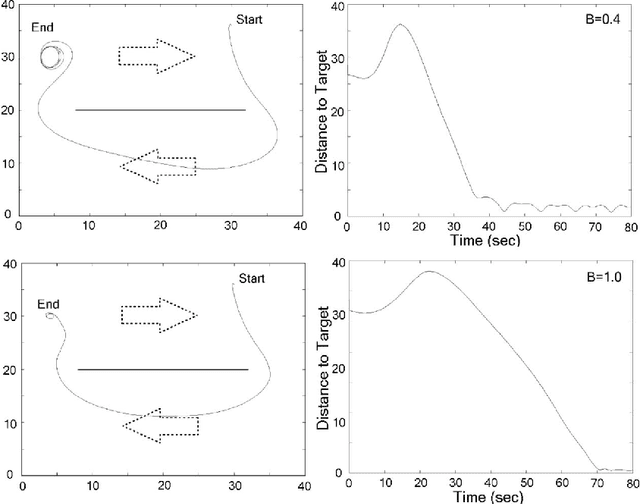
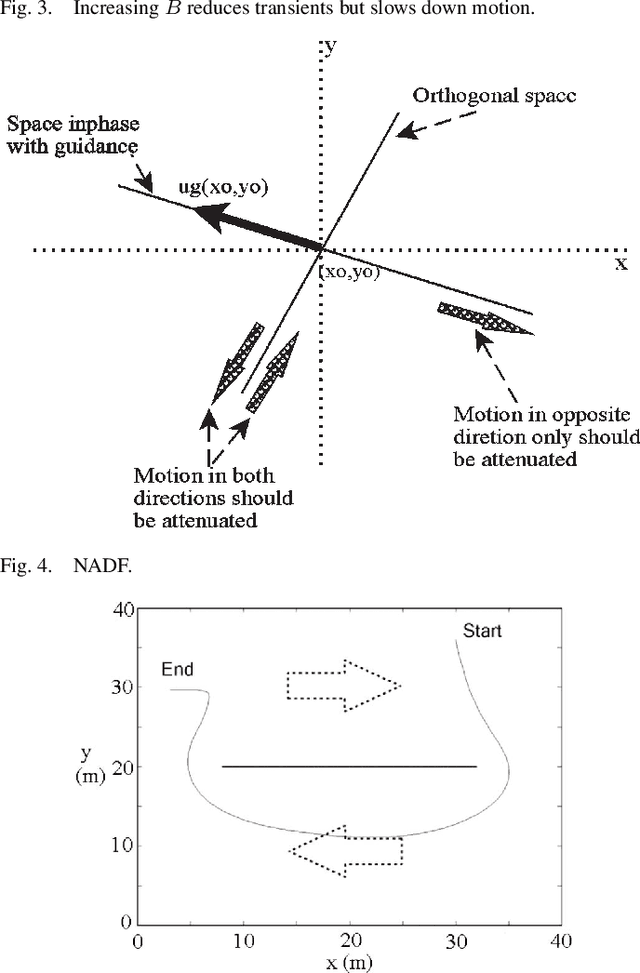
This paper demonstrates the ability of the harmonic potential field, HPF, planning method to generate a well-behaved constrained path for a robot with second order dynamics in a cluttered environment. It is shown that HPF-based controllers may be developed for holonomic as well as nonholonomic robots to effectively suppress the effect of inertial forces on the robot trajectory while maintaining all the attractive features of a purely kinematic HPF planner. The capabilities of the suggested navigation controller are demonstrated using simulation results. Comparisons are also supplied with other approaches used for converting the guidance signal from a purely kinematic HPF planner into a navigation control signal.
A Hybrid, PDE-ODE Control Strategy for Intercepting an Intelligent, well-informed Target in a Stationary, Cluttered Environment
Aug 20, 2016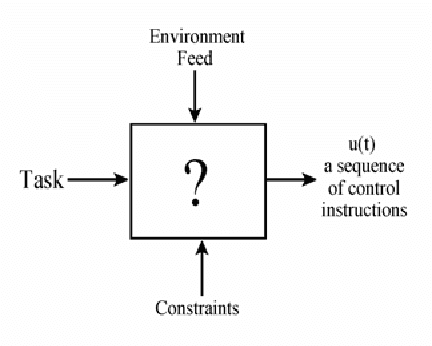
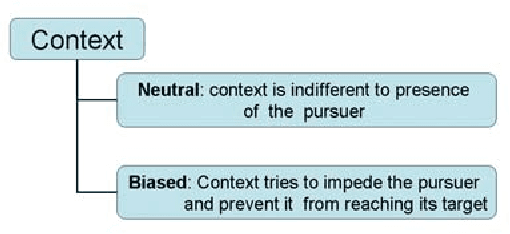
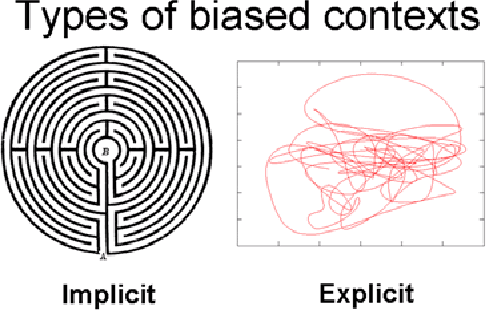
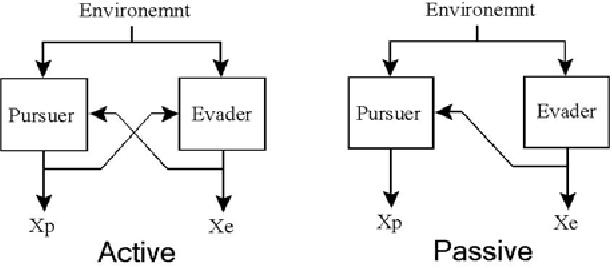
In [1,2] a new class of intelligent controllers that can semantically embed an agent in a spatial context constraining its behavior in a goal-oriented manner was suggested. A controller of such a class can guide an agent in a stationary unknown environment to a fixed target zone along an obstacle-free trajectory. Here, an extension is suggested that would enable the interception of an intelligent target that is maneuvering to evade capture amidst stationary clutter (i.e. the target zone is moving). This is achieved by forcing the differential properties of the potential field used to induce the control action to satisfy the wave equation. Background of the problem, theoretical developments, as well as, proofs of the ability of the modified control to intercept the target along an obstacle-free trajectory are supplied. Simulation results are also provided.
* 22 pages, 20 figures, Journal paper
Decentralized, Self-organizing, Potential field-based Control for Individuallymotivated, Mobile Agents in a Cluttered Environment: A Vector-Harmonic Potential Field Approach
Jul 09, 2016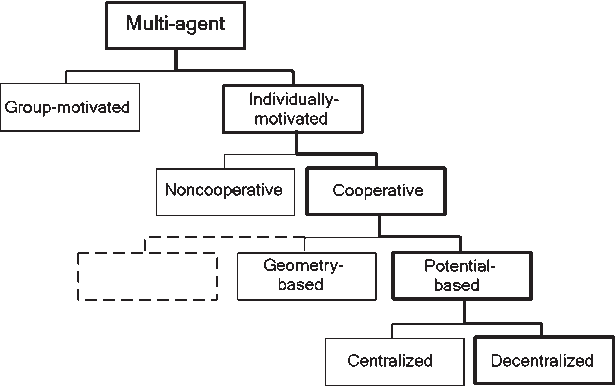
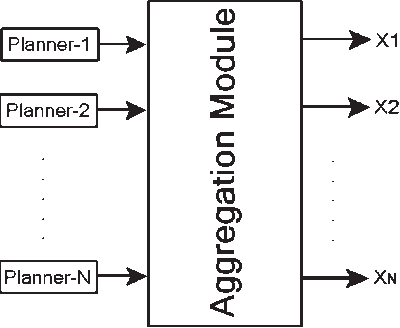
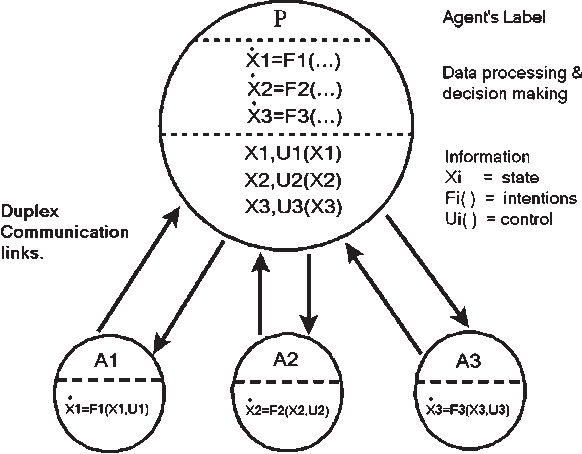
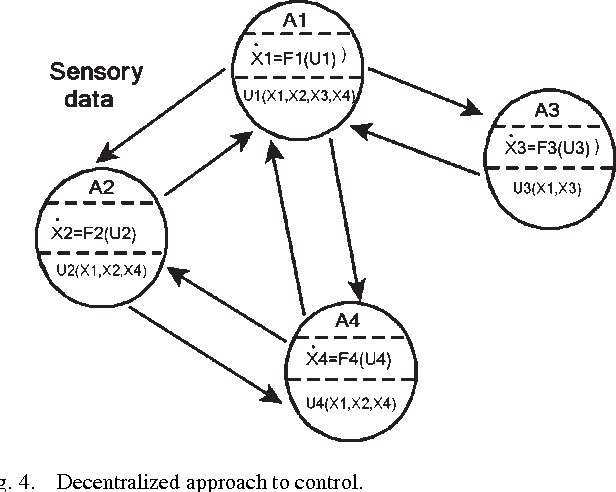
Spatial multi-agency has been receiving growing attention from researchers exploring many of the aspects and modalities of this phenomenon. The aim is to develop the theoretical background needed for a multitude of applications involving the sharing of resources by more than one agent. A traffic management system is one of these applications. Here, a large group of mobile robots that are operating in communication-limited, and sensory-limited modes are required to cope with each others presence as well as the contents of their environment while preserving their ability to reach their preset, independent goals. This work explores the construction of a decentralized traffic controller for a large group of agents sharing a workspace with stationary forbidden regions. The suggested multi-agent motion controller is complete provided that a lenient condition on the geometry of the workspace is upheld. It has a low computational effort that linearly increases with the number of agents. The controller is also self-organizing; therefore, it is able to deal, on its own, with incomplete information and unexpected situations. In addition to the above, the controller has an open structure to enable any agent to join or leave the group without the remaining agents having to adjust the manner in which they function. To meet these requirements, a definition of decentralization is suggested. This definition equates decentralization to self-organization in a group of agents operating in an artificial life mode. The definition is used to provide guidelines for the construction of the multi-agent controller. The controller is realized using the potential field approach. Theoretical developments, as well as simulation results, are provided.
Nearest Neighbor-based Rendezvous for Sparsely Connected Mobile Agents
Jul 03, 2016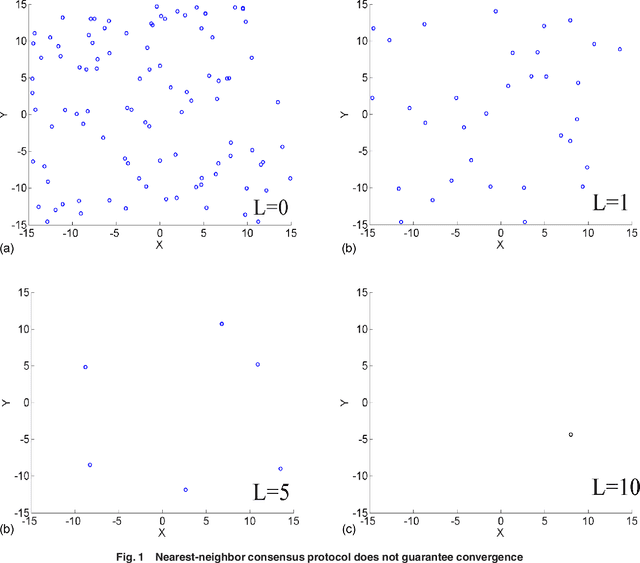
In this paper a convergent, nearest-neighbor, control protocol is suggested for agents with nontrivial dynamics. The protocol guarantees convergence to a common point in space even if each agent is restricted to communicate with a single nearest neighbor. The neighbor, however, is required to lie outside an arbitrarily small priority zone surrounding the agent. The control protocol consists of two layers interconnected in a provably-correct manner. The first layer provides the guidance signal to a rendezvous point assuming that the agents have first order dynamics. The other layer converts in a decentralized manner the guidance signal to a control signal that suits realistic agents such as UGVs, UAVs and holonomic agents with second order dynamics.
Motion Planning With Gamma-Harmonic Potential Fields
Jun 29, 2016This paper extends the capabilities of the harmonic potential field (HPF) approach to planning. The extension covers the situation where the workspace of a robot cannot be segmented into geometrical subregions where each region has an attribute of its own. The suggested approach uses a task-centered, probabilistic descriptor of the workspace as an input to the planner. This descriptor is processed, along with a goal point, to yield the navigation policy needed to steer the agent from any point in its workspace to the target. The approach is easily adaptable to planning in a cluttered environment containing a vector drift field. The extension of the HPF approach is based on the physical analogy with an electric current flowing in a nonhomogeneous conducting medium. The resulting potential field is known as the gamma-harmonic potential (GHPF). Proofs of the ability of the modified approach to avoid zero-probability (definite threat) regions and to converge to the goal are provided. The capabilities of the planer are demonstrated using simulation.
A Harmonic Potential Approach For Simultaneous Planning And Control Of A Generic UAV Platform
Jun 29, 2016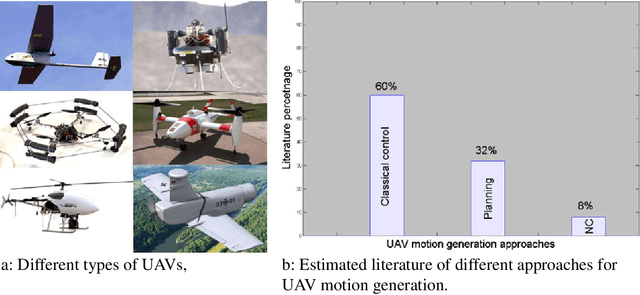
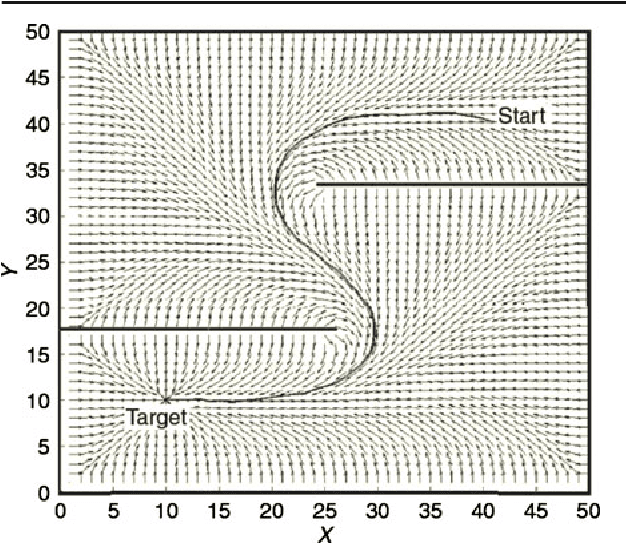
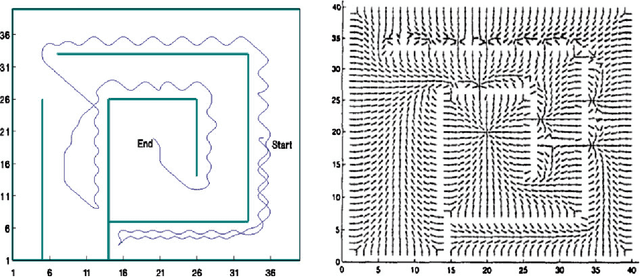
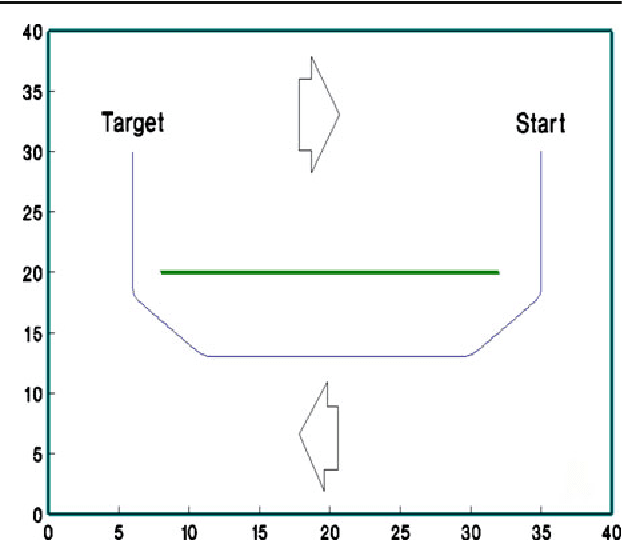
Simultaneous planning and control of a large variety of unmanned aerial vehicles (UAVs) is tackled using the harmonic potential field (HPF) approach. A dense reference velocity field generated from the gradient of an HPF is used to regulate the velocity of the UAV concerned in a manner that would propel the UAV to a target point while enforcing the constraints on behavior that were a priori encoded in the reference field. The regulation process is carried-out using a novel and simple concept called the: virtual velocity attractor (VVA). The combined effect of the HPF gradient and the VVA is found able to yield an efficient, easy to implement, well-behaved and provably-correct context-sensitive control action that suits a wide variety of UAVs. The approach is developed and basic proofs of correctness are provided along with simulation results.