 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnmanned Aerial Vehicle Instrumentation for Rapid Aerial Photo System
Apr 24, 2008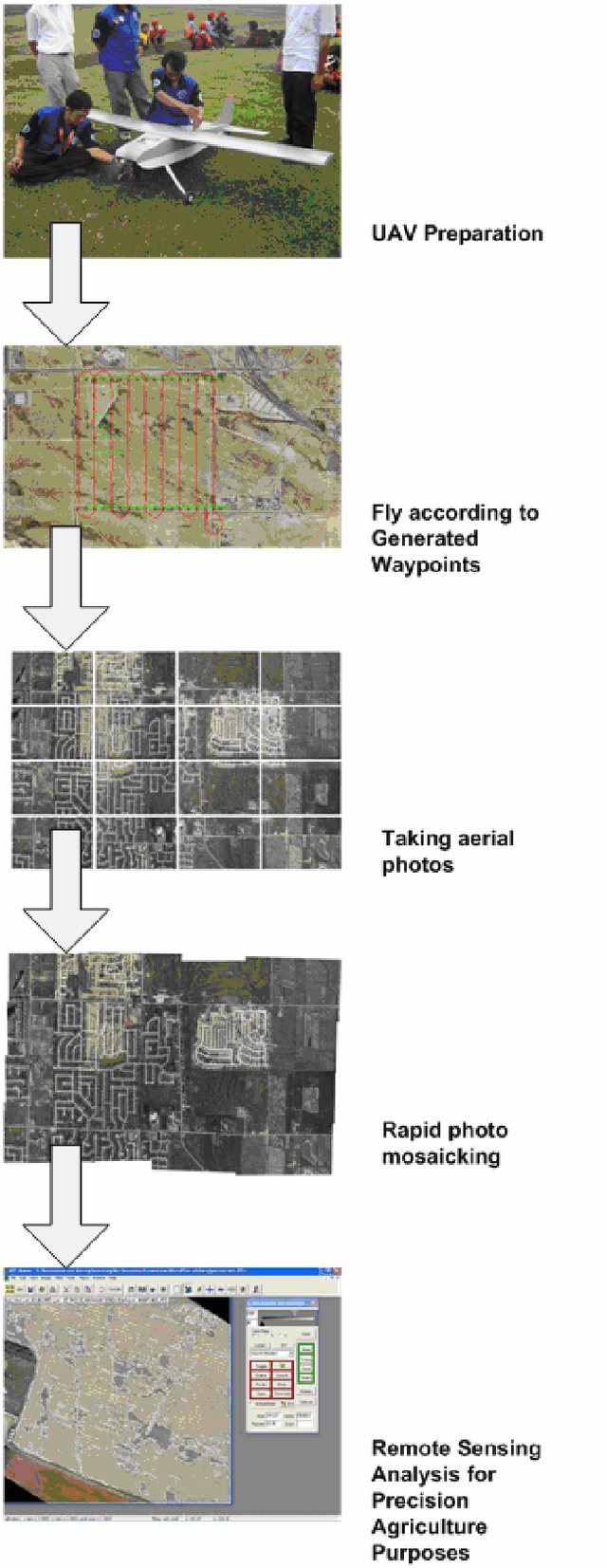
This research will proposed a new kind of relatively low cost autonomous UAV that will enable farmers to make just in time mosaics of aerial photo of their crop. These mosaics of aerial photo should be able to be produced with relatively low cost and within the 24 hours of acquisition constraint. The autonomous UAV will be equipped with payload management system specifically developed for rapid aerial mapping. As mentioned before turn around time is the key factor, so accuracy is not the main focus (not orthorectified aerial mapping). This system will also be equipped with special software to post process the aerial photos to produce the mosaic aerial photo map
* Uploaded by ICIUS2007 Conference Organizer on behalf of the author(s). 8 pages, 9 figures
Automated Flight Test and System Identification for Rotary Wing Small Aerial Platform using Frequency Responses Analysis
Apr 24, 2008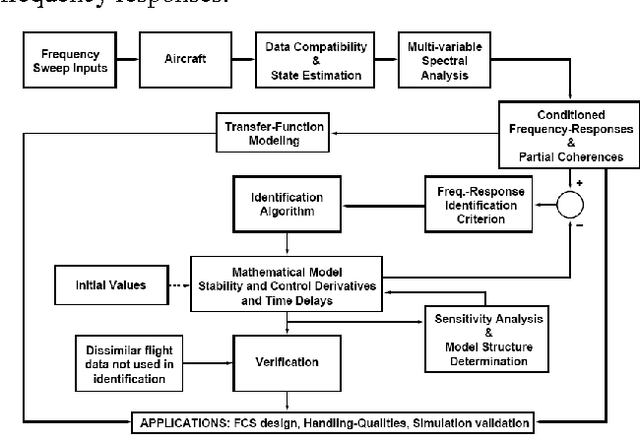
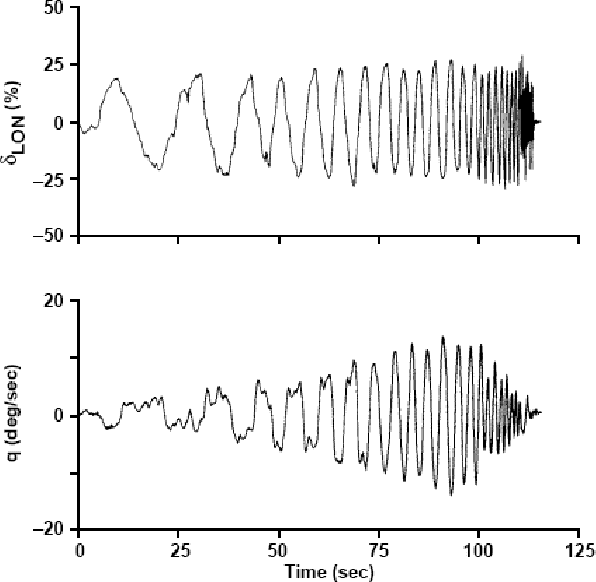
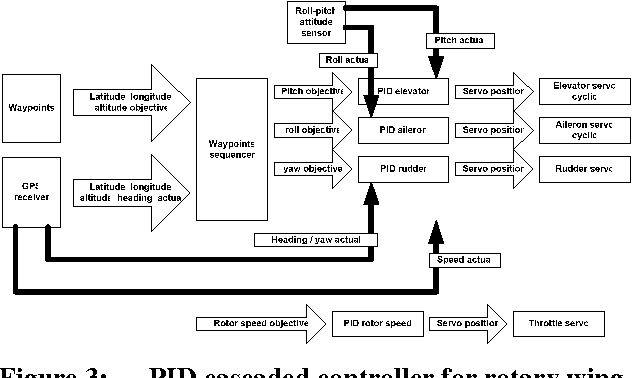
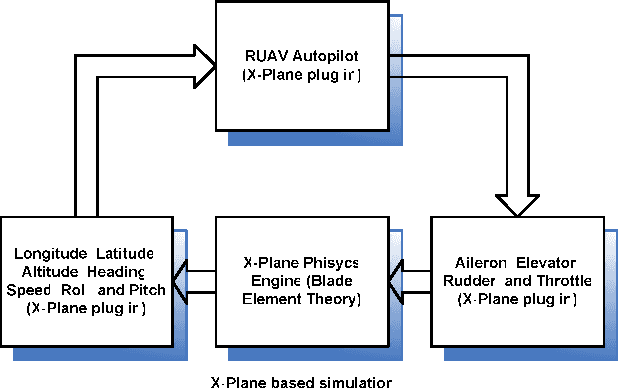
This paper proposes an autopilot system that can be used to control the small scale rotorcraft during the flight test for linear-frequency-domain system identification. The input frequency swept is generated automatically as part of the autopilot control command. Therefore the bandwidth coverage and consistency of the frequency swept is guaranteed to produce high quality data for system identification. Beside that we can set the safety parameter during the flight test (maximum roll or pitch value, minimum altitude, etc) so the safety of the whole flight test is guaranteed. This autopilot for automated flight test will be tested using hardware in the loop simulator for hover flight condition.
* Uploaded by ICIUS2007 Conference Organizer on behalf of the author(s). 7 pages, 15 figures
Hardware In The Loop Simulator in UAV Rapid Development Life Cycle
Apr 24, 2008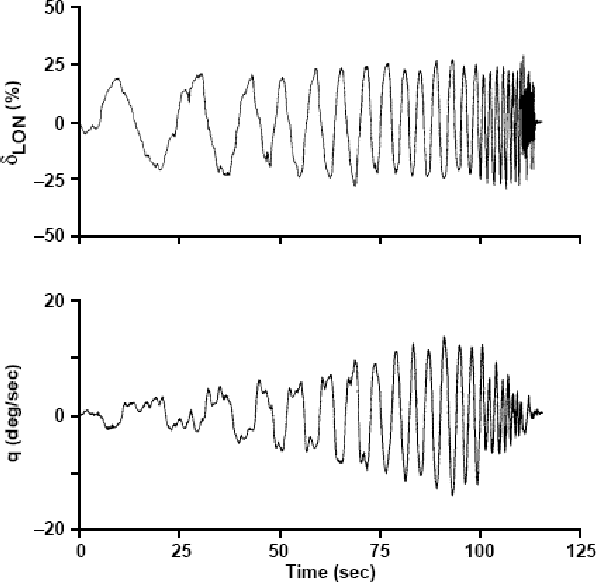
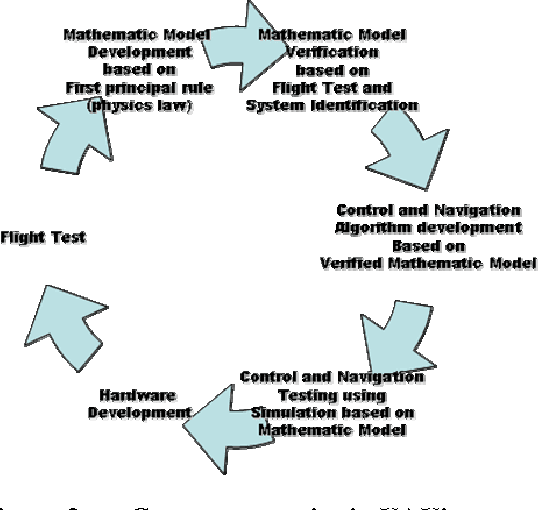
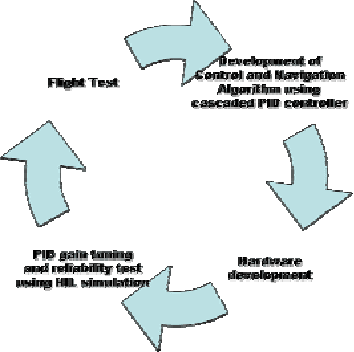
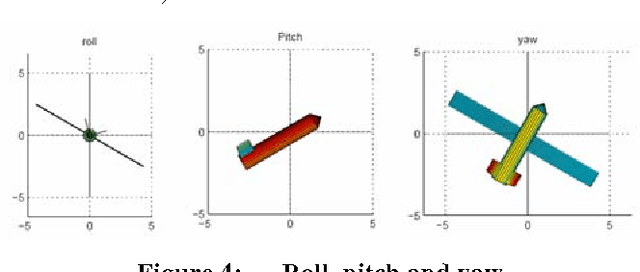
Field trial is very critical and high risk in autonomous UAV development life cycle. Hardware in the loop (HIL) simulation is a computer simulation that has the ability to simulate UAV flight characteristic, sensor modeling and actuator modeling while communicating in real time with the UAV autopilot hardware. HIL simulation can be used to test the UAV autopilot hardware reliability, test the closed loop performance of the overall system and tuning the control parameter. By rigorous testing in the HIL simulator, the risk in the field trial can be minimized.
* Uploaded by ICIUS2007 Conference Organizer on behalf of the author(s). 6 pages, 13 figures