 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUWB Ranging and IMU Data Fusion: Overview and Nonlinear Stochastic Filter for Inertial Navigation
Aug 25, 2023This paper proposes a nonlinear stochastic complementary filter design for inertial navigation that takes advantage of a fusion of Ultra-wideband (UWB) and Inertial Measurement Unit (IMU) technology ensuring semi-global uniform ultimate boundedness (SGUUB) of the closed loop error signals in mean square. The proposed filter estimates the vehicle's orientation, position, linear velocity, and noise covariance. The filter is designed to mimic the nonlinear navigation motion kinematics and is posed on a matrix Lie Group, the extended form of the Special Euclidean Group $\mathbb{SE}_{2}\left(3\right)$. The Lie Group based structure of the proposed filter provides unique and global representation avoiding singularity (a common shortcoming of Euler angles) as well as non-uniqueness (a common limitation of unit-quaternion). Unlike Kalman-type filters, the proposed filter successfully addresses IMU measurement noise considering unknown upper-bounded covariance. Although the navigation estimator is proposed in a continuous form, the discrete version is also presented. Moreover, the unit-quaternion implementation has been provided in the Appendix. Experimental validation performed using a publicly available real-world six-degrees-of-freedom (6 DoF) flight dataset obtained from an unmanned Micro Aerial Vehicle (MAV) illustrating the robustness of the proposed navigation technique. Keywords: Sensor-fusion, Inertial navigation, Ultra-wideband ranging, Inertial measurement unit, Stochastic differential equation, Stability, Localization, Observer design.
Nonlinear Deterministic Observer for Inertial Navigation using Ultra-wideband and IMU Sensor Fusion
Aug 15, 2023Navigation in Global Positioning Systems (GPS)-denied environments requires robust estimators reliant on fusion of inertial sensors able to estimate rigid-body's orientation, position, and linear velocity. Ultra-wideband (UWB) and Inertial Measurement Unit (IMU) represent low-cost measurement technology that can be utilized for successful Inertial Navigation. This paper presents a nonlinear deterministic navigation observer in a continuous form that directly employs UWB and IMU measurements. The estimator is developed on the extended Special Euclidean Group $\mathbb{SE}_{2}\left(3\right)$ and ensures exponential convergence of the closed loop error signals starting from almost any initial condition. The discrete version of the proposed observer is tested using a publicly available real-world dataset of a drone flight. Keywords: Ultra-wideband, Inertial measurement unit, Sensor Fusion, Positioning system, GPS-denied navigation.
Observer-based Controller for VTOL-UAVs Tracking using Direct Vision-Aided Inertial Navigation Measurements
Dec 30, 2022This paper proposes a novel observer-based controller for Vertical Take-Off and Landing (VTOL) Unmanned Aerial Vehicle (UAV) designed to directly receive measurements from a Vision-Aided Inertial Navigation System (VA-INS) and produce the required thrust and rotational torque inputs. The VA-INS is composed of a vision unit (monocular or stereo camera) and a typical low-cost 6-axis Inertial Measurement Unit (IMU) equipped with an accelerometer and a gyroscope. A major benefit of this approach is its applicability for environments where the Global Positioning System (GPS) is inaccessible. The proposed VTOL-UAV observer utilizes IMU and feature measurements to accurately estimate attitude (orientation), gyroscope bias, position, and linear velocity. Ability to use VA-INS measurements directly makes the proposed observer design more computationally efficient as it obviates the need for attitude and position reconstruction. Once the motion components are estimated, the observer-based controller is used to control the VTOL-UAV attitude, angular velocity, position, and linear velocity guiding the vehicle along the desired trajectory in six degrees of freedom (6 DoF). The closed-loop estimation and the control errors of the observer-based controller are proven to be exponentially stable starting from almost any initial condition. To achieve global and unique VTOL-UAV representation in 6 DoF, the proposed approach is posed on the Lie Group and the design in unit-quaternion is presented. Although the proposed approach is described in a continuous form, the discrete version is provided and tested. Keywords: Vision-aided inertial navigation system, unmanned aerial vehicle, vertical take-off and landing, stochastic, noise, Robotics, control systems, air mobility, observer-based controller algorithm, landmark measurement, exponential stability.
Nonlinear Filter for Simultaneous Localization and Mapping on a Matrix Lie Group using IMU and Feature Measurements
Jan 05, 2021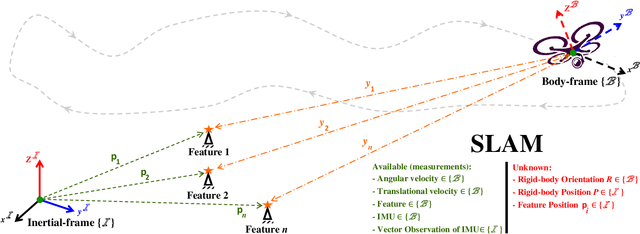
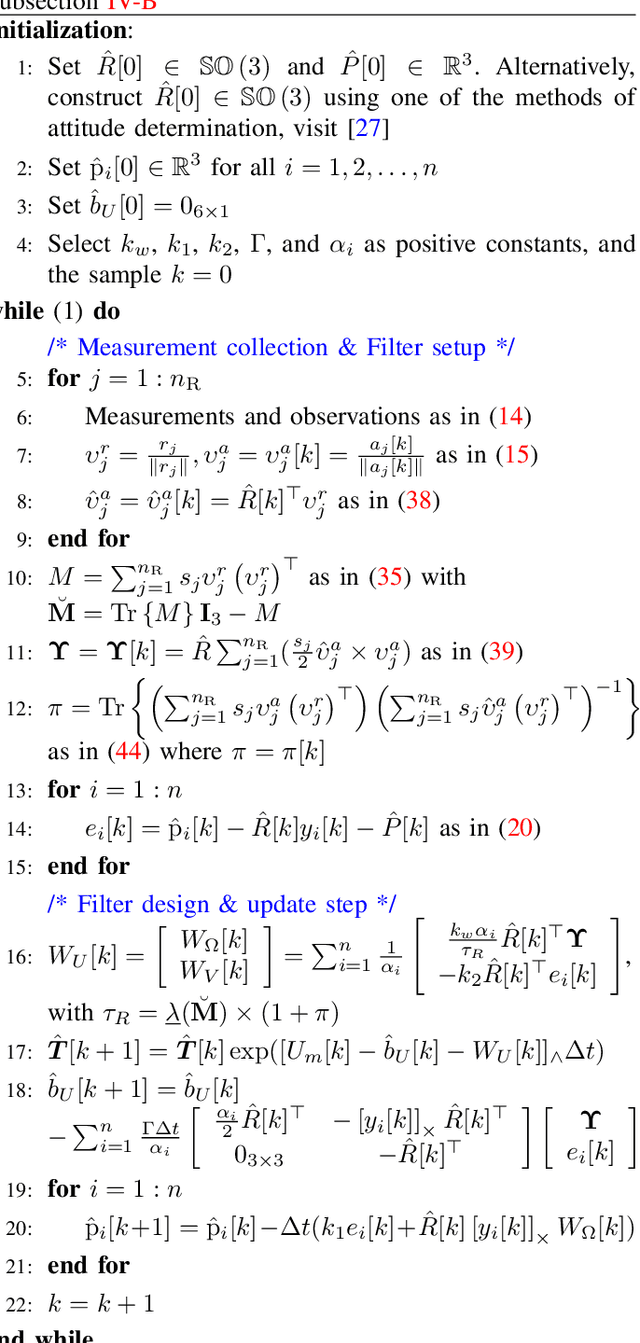
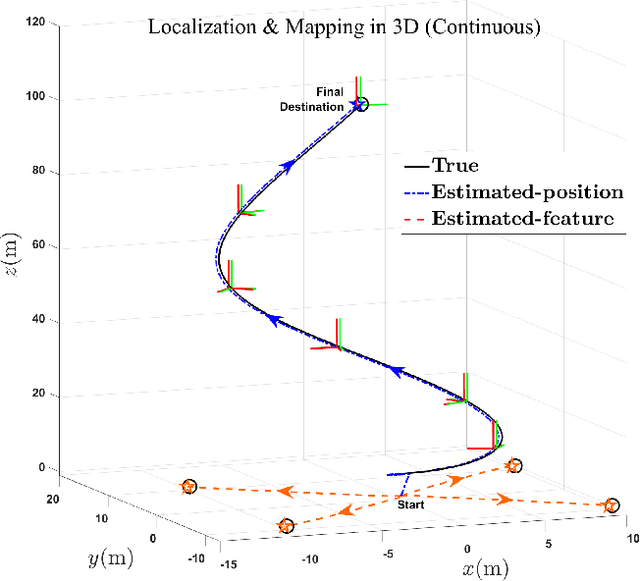
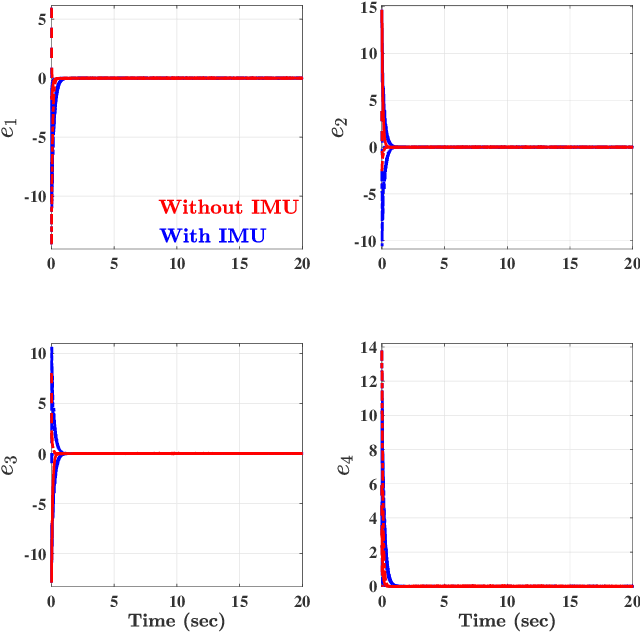
Simultaneous Localization and Mapping (SLAM) is a process of concurrent estimation of the vehicle's pose and feature locations with respect to a frame of reference. This paper proposes a computationally cheap geometric nonlinear SLAM filter algorithm structured to mimic the nonlinear motion dynamics of the true SLAM problem posed on the matrix Lie group of $\mathbb{SLAM}_{n}\left(3\right)$. The nonlinear filter on manifold is proposed in continuous form and it utilizes available measurements obtained from group velocity vectors, feature measurements and an inertial measurement unit (IMU). The unknown bias attached to velocity measurements is successfully handled by the proposed estimator. Simulation results illustrate the robustness of the proposed filter in discrete form demonstrating its utility for the six-degrees-of-freedom (6 DoF) pose estimation as well as feature estimation in three-dimensional (3D) space. In addition, the quaternion representation of the nonlinear filter for SLAM is provided. Keywords: Simultaneous Localization and Mapping, Nonlinear observer algorithm for SLAM, inertial measurement unit, inertial vision system, pose, position, attitude, landmark, estimation, IMU, SE(3), SO(3), unmanned aerial vehicle, rigid-body, noise, nonlinear observer for SLAM, Gaussian filter, Kalman filtering, navigation.